Experiment 5: Self-Tuned Filter¶
Abstract¶
Wenn es um die Signalverarbeitung geht sind Filter unumgänglich, egal ob es die analoge oder die digitale Signalverarbeitung ist. Die Vorgänger der digitalen Signalverarbeitung waren schon immer die analoge Signalverarbeitung. Mit der Zeit haben sich die digitalen Systeme immer mehr etabliert. Die Pioniere der digitalen Filter verließen sich auf die Techniken der analogen Vorgänger. Auch heute noch profitieren einige digitale Filter von der Simulation der analogen Filtern, denn die analogen Filter enthalten wichtige Eigenschaften.
Die Filter, die auf eine Eingangssteuerspannung mit der Änderung der Resonanzfrequenz reagieren werden „self-tuning“ Filter genannt. Oftmals verfügen diese Filter über eine Gegenkopplungsschaltung mit einen analogen Multiplizierer oder Phasendetektor. Die „self-tuning“ Filter ermöglichen eine automatische Abstimmung der Bandbreite, des Qualitätsfaktors und/oder der Mittenfrequenz ([8]).
Einleitung¶
Das vorliegende Experiment bietet einen Überblick über den analogen „self-tuning“ Filter aus theoretischer und praktischer Sicht. Das umfasst von Implementierung der Schaltung in ein Simulationsmodel, aufbau der Schaltung auf dem „Analog System Lab Kit PRO“ board und Analyse der Messdaten. Es enthält Erkenntnisse über die Funktionsweise der „self-tuning“ Filter, deren Bausteine, aus denen sie implementiert werden.
Das „self-tuning“ Filter ist ein Sonderfall von analogen Filtern in elektronischen Schaltungen. Deren Aufgabe ist es Signale mit unerwünschten Frequenzen oder Rauschen die das gewünschte Signal überlagern, zu blockieren oder zu dämpfen. Die scharfe Unterscheidung wird erreicht, indem die Resonanzfrequenz des Filters der Grundfrequenz des Eingangssignals folgt. Der Gesamtaufbau besteht aus zwei Hauptblöcken, einmal aus dem spannungsgesteuerten Filter und dem analogen Phasendetektor. Die Funktionsweise dieser Blöcke wird in den kommenden Abschnitten beschrieben.
Theoretische Vorbetrachtung¶
Universeller Aktivfilter (Experiment 4)¶
Der „Selftuned Filter“ baut auf dem Ergebnis aus Experiment 4 auf. Daher werden die Grundlagen noch einmal wiederholt. Der universelle Aktivfilter (vgl. Abb. 33) ist ein Aktivfilter, welcher die vier Grundfilterarten (Tiefpass [LPF], Hochpass [HPF], Bandpass [BPF] und Bandsperre [BSF]) in sich vereint. Wie in der selben Abbildung zu sehen, lassen sich die Verstärkung und der Q-Faktor mit den Widerständen unten in der Mitte dimensionieren. Die Mittenfrequenz des Filters lässt sich mit den Widerständen „R“ und den Kondensatoren „C“ einstellen (vgl. Gl. 20).
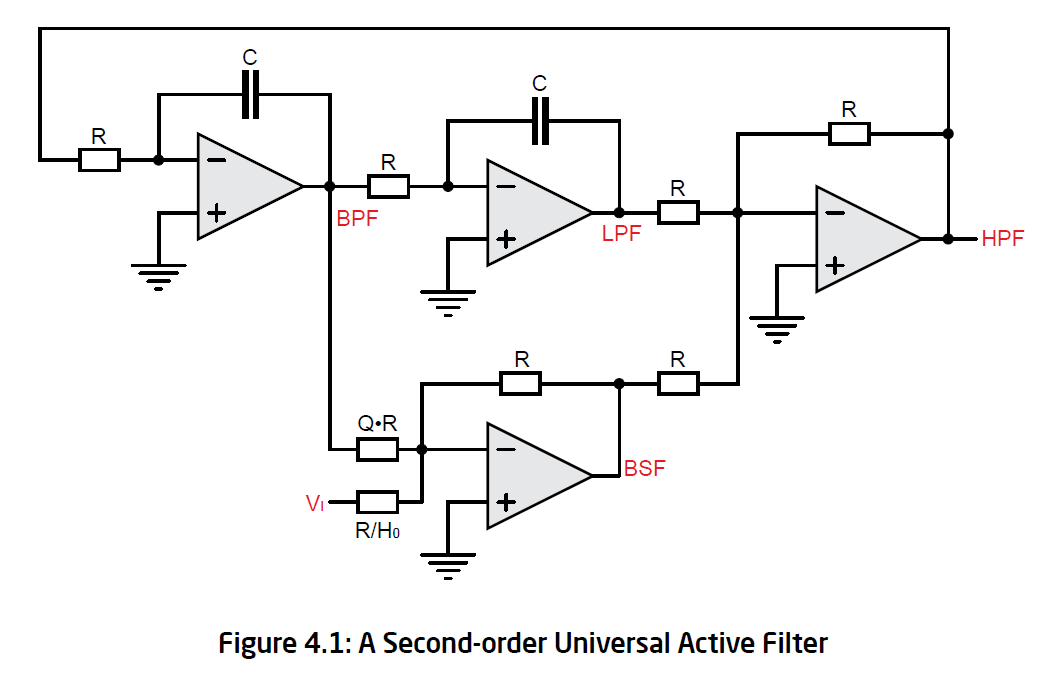
Es lässt sich zeigen, dass die Übertragungsfunktionen der einzelnen Teilfilter, wie in Abbildung Abb. 34 zu sehen beschrieben werden können. Diese werden sich beim Umbau in den „Self-tuned Filter“ nicht ändern. \(\omega_0\) wird beim Umbau zeitabhängig.
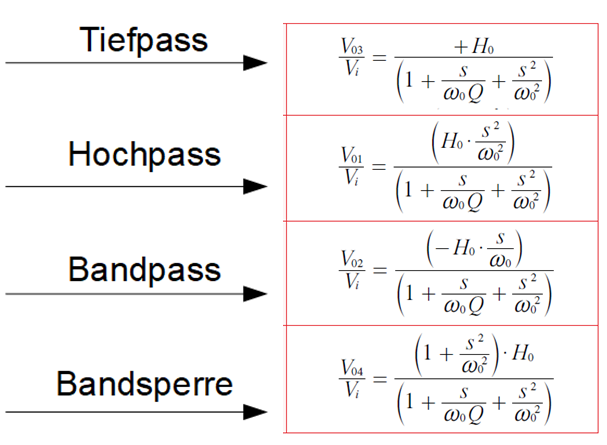
Abb. 34 Übertragungsfunktionen des universellen Aktivfilters ([7])¶
Integrator¶
Wie in Abb. 35 zu erkennen, besteht ein Integrator aus einem Eingang \(V_{in}\), einem Widerstand, einem Kondensator, einem Operationsverstärker und einem Ausgang \(V_{out}\). Ein Integrator hat die Eigenschaft ein Eingangssignal integrieren zu können.
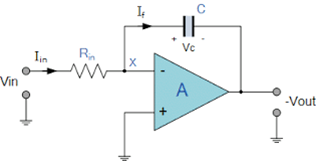
Abb. 35 Integrator¶
In der folgenden Gleichung Gl. 21 wird die Übertragungsfunktion eines Integrators hergeleitet. Hierbei wird davon ausgegangen, dass sich an „+“ ein virtuelles GRD-Potenzial befindet.
Ebenfalls hat ein Integrator Tiefpasseigenschaften, welche im Idealfall mit der Grenzfrequenz Gl. 22 beschrieben werden können. Diese beiden Eigenschaften (Integrieren und Tiefpass) sind für die Rückführung am Ende der Schaltung (vgl. Abb. 44) sehr wichtig.
Multiplizierer¶
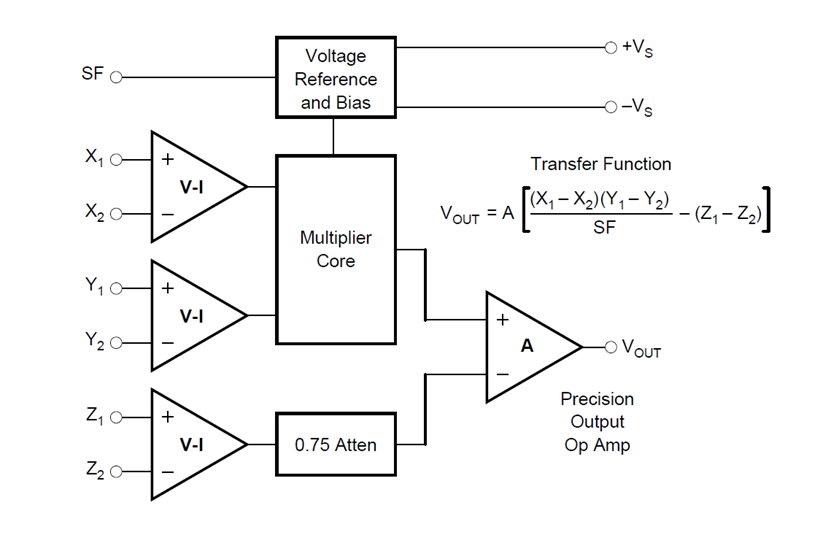
In Abb. 36 ist der Aufbau eines Multiplizierers, sowie seine Transferfunktion, zu sehen. SF (später \(U_{SF}\)) ist der Eingang für die Referenzspannung, welche gleichzeitig die Versorgungsspannung darstellt. Die Eingänge X, Y und Z sind jeweils in zwei Eingänge eines Operationsverstärkers aufgeteilt. Hierbei gibt der Index 1 immer den positiven und der Index 2 den negativen Eingang an. Der Ausgang \(V_{OUT}\) ist der Ausgang des Multiplizierers. Die anderen beiden Ausgänge (\(+V_S\) und \(–V_S\)) stellen die Versorgungsspannung dar und sind bereits intern verbunden. Diese sind daher für uns nicht von Bedeuteung.
Ein vereinfachte Version des Multiplizierers ist in Abb. 37 zu sehen. Im Vergleich zu Abb. 36 sind die negativen Eingänge von X, Y und Z geerdet und \(V_{OUT}\) ist mit \(Z_1\) verbunden. Letzteres wurde experimentell entdeckt und kann daher nicht weiter begründet werden. Die Referenzspannung \(U_{SF}\) wird nur noch mathematisch betrachtet. Hieraus ergibt sich die vereinfachte Transferfunktion, welche in Gl. 23 zu sehen ist. Es ist nur zu beachten, dass der Betrag von X und Y nicht über \(U_{SF}\) fallen sollte, da der Multiplizierer nur in diesem Bereich arbeitet.
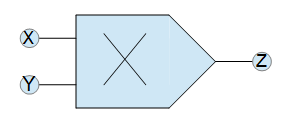
Abb. 37 Einfacher Multiplizierer¶
Spannungsgesteuerter Tiefpass (Integrator)¶
Baut man einen Multiplizierer, wie in Abb. 38 gezeigt, in einen Integrator vor den Kondensator ein, dann kann man den Integrator mithilfe der Kontrollspannung \(V_C\) steuern. Dies hat direkten Einfluss auf die Transferfunktion des Integrators und damit auf die Grenzfrequenz der Tiefpasseigenschaft des Integrators.
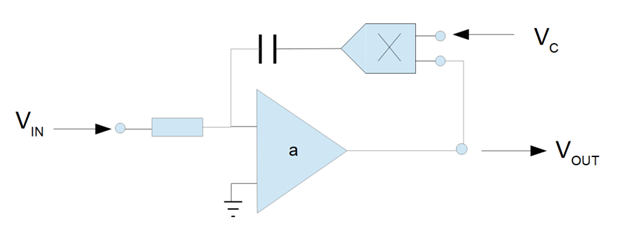
Abb. 38 Spannungsgesteuerter Tiefpass¶
Die Herleitung der Grenzfrequenz des spannungsgesteuerten Integrators ist in Gl. 24 zu sehen. Hierbei ist für uns insbesondere die Grenzfrequenz von Bedeutung, dann die Grenzfrequenz des Universellen Aktivfilters aus Experiment 4 entspricht der Grenzfrequenz der beiden verbauten Integratoren, weshalb man diese auch immer gleich dimensionieren sollte.
Phasendetektor mit einem Multiplizierer¶
Um diesen Phasendetektor zu verstehen, betrachtet man zunächst erstmal einen vereinfachten Aufbau des Phasendetektors. Wie in Abb. 39 zu sehen, wird hierzu ein Tiefpass hinter den Multiplizierer geschaltet. Die Eingangssignale sind zwei phasenverschobene Sinussignale.
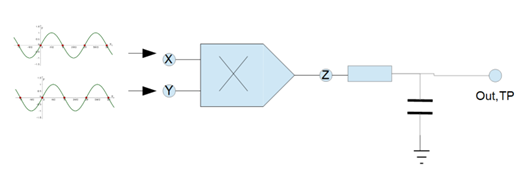
Abb. 39 Phasendetektor¶
In Abb. 40 ist die Herleitung des Ausgangssignals des Multiplizierers zu sehen. Dieses Bild ist einer eigenen Power Point Präsentation entnommen, welche unter dem Link zu finden ist.
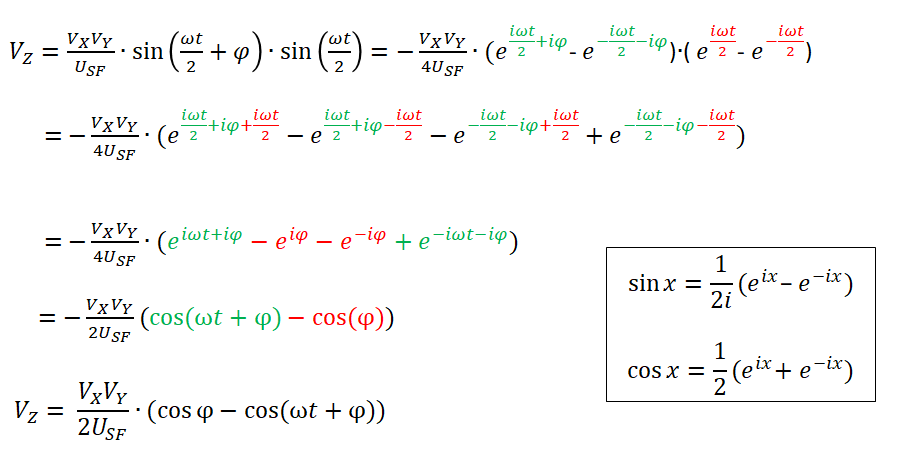
Abb. 40 Herleitung Phasendetektor¶
Setzt man nun wie in Abb. 39 einen Tiefpass hinter den Multiplizierer werden alle Frequenz abhängigen Anteile herausgefiltert, wenn die Grenzfrequenz des Tiefpasses klein genug ist. Daraus ergibt sich die Gl. 25.
Wird der Tiefpass nun mit einem Integrator ersetzt (vgl. Abb. 41), dann lässt sich die Spannung aus Gl. 25 in die Transferfunktion des Integrators (vgl. Gl. 21) einsetzten. Zusätzlich ist nun auch die Betriebsspannung des benutzten Operationsverstärkers zu betrachten, da die Transferfunktion des Integrators da drauf addiert wird. Der auf dem ALSK PRO Board eingebaute „tl082“ hat eine Betriebsspannung bei 82% der Versorgungsspannung (\(U_{AMP}\)). In Gl. 26 ist die resultierende Spannungsgleichung zu sehen.
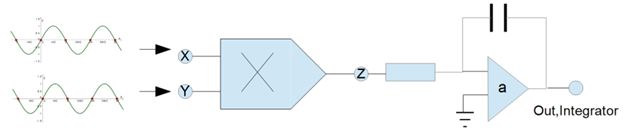
Abb. 41 Phasendetektor mit Integrator¶
Dieser Phasendetektor ist in einem Regelkreislauf sehr gut um eine Phase von 90° einzustellen, da die Spannung des Integrators sinkt, wenn die Phase unter 90° ist und steigt wenn sie über 90° ist. Bei genau 90° Phasendifferenz wird sich die Spannung am Ausgang des Integrators nicht mehr ändern.
Phase des Universellen Aktivfilters¶
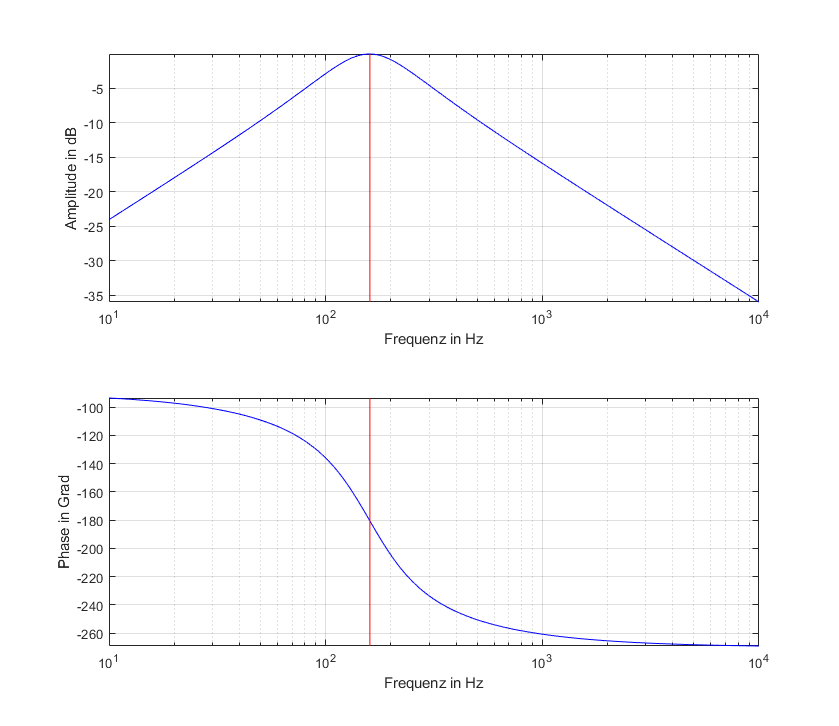
In Abb. 42 ist das Bode-Diagramm des Bandpass-Ausgangs eines Universellen Aktivfilters zu sehen. Zu erkennen ist, dass bei einer Phasenverschiebung von -180° zum Eingangssignal das Betragsspektrum am größten ist. Das ist die Grenzfrequenz des universellen Aktivfilters.
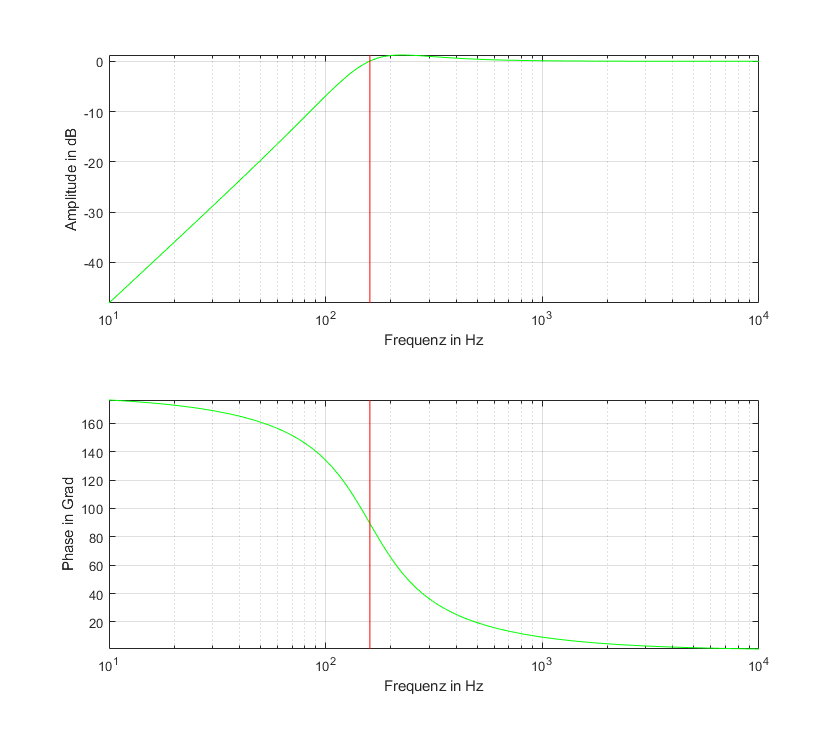
Betrachtet man nun den Hochpass (vgl. Abb. 43) des Universellen Aktivfilters an der gleichen Frequenz, ist eine Phsenverschiebung von 90° zum Eingangssignal zu erkennen. Diese Phasenverschiebung lässt sich mit dem zuvor beschriebenen Phasendetektor einstellen.
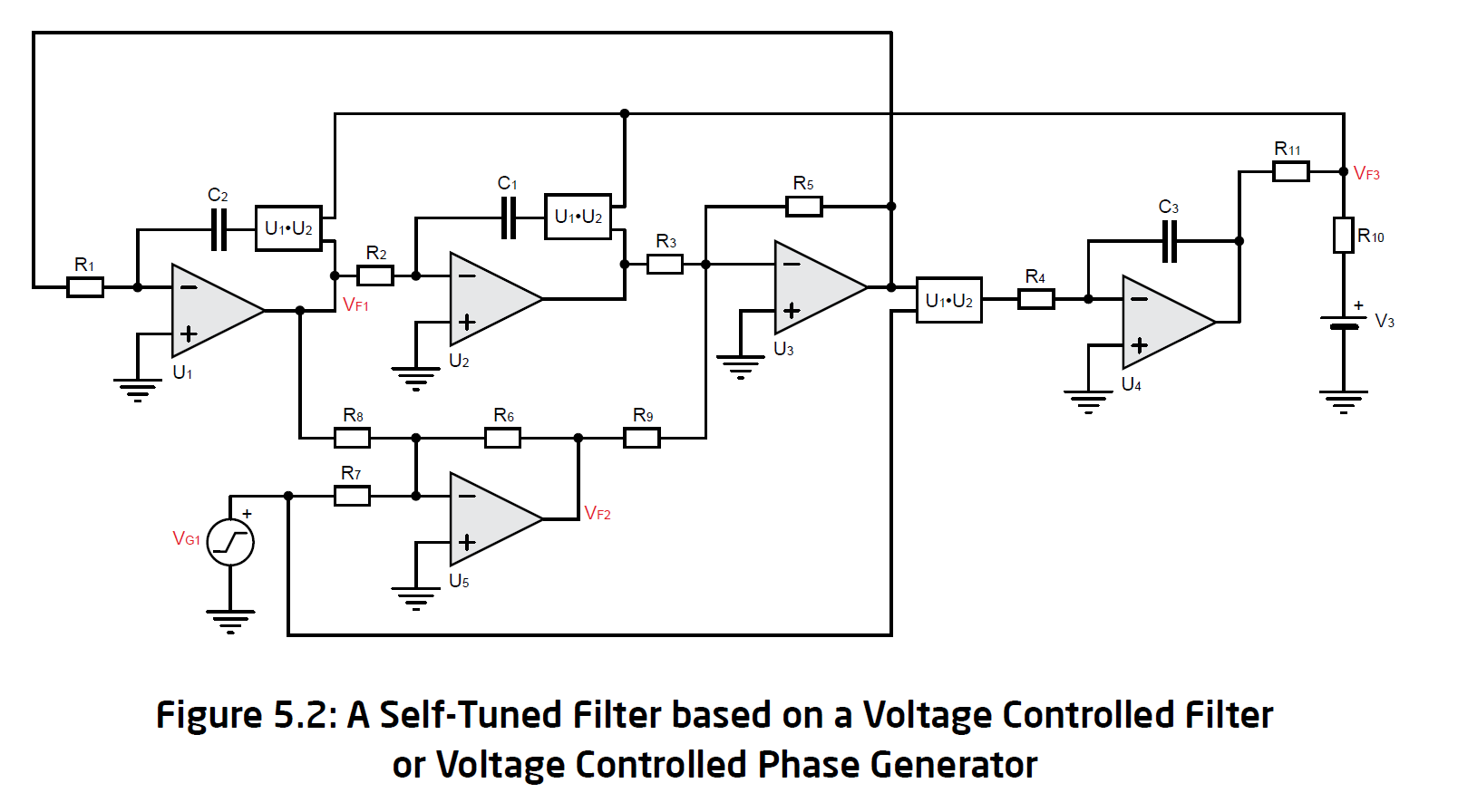
Aufbau des Selftuned Filters¶
In Abb. 44 ist der Aufbau des Selftuned Filters zu sehen. Im Vergleich zum Aufbau des Universellen Aktivfilters (vgl. Abb. 33) ist zu erkennen, dass spannungsgesteuerte Integratoren statt normale Integratoren verbaut wurden. Da die Mittenfrequenz des Universellen Aktivfilters von der Grenzfrequenz der Integratoren abhängt, lässt sich auf diese Weise die Mittenfrequenz des Universellen Aktivfilters steuern. Ebenfalls fällt auf, dass mithilfe des Phasendetektors ein Regelkreislauf aufgebaut ist. Als Eingänge des Phasendetektors wurden der Hochpass und das Eingangssignal gewählt. Zusätzlich wurde noch ein Bias mit einem Spannungsteiler ans Ende des Phasendetektors gesetzt. Damit lässt sich die Kontrollspannung für den spannungsgesteuerten universellen Aktivfilter voreinstellen.
Regelkreislauf des Selftuned Filters¶
Um den Regelkreislauf des „Selftuned Filters“ zu erklären, wurde in Abb. 45 die Schaltung des „Self-tuned Filters“ (vgl. Abb. 44) als Blockschaltbild zusammengefasst.
Zu Beginn des Kreislaufs wird das Eingangssignal durch den VCF (Voltage Controlled Filter, hier: Spannungsgesteuerter universeller Aktivfilter) mit dem Hochpass gefiltert. Das Hochpasssignal wird im Phasendetektor mit dem Eingangssignal verglichen. Ist die Phasendifferenz unter 90°, sinkt die Kontrollspannung (\(V_C\)) des VCFs und ist sie über 90°, steigt die Kontrollspannung. So schwingt die Kontrollspannung sich auf die Spannung ein, bei der die Phasendifferenz zwischen Hochpass und Eingangssignal genau 90° beträgt und somit die Mittenfrequenz des VCFs auf die Trägerfrequenz des Eingangssignals eingestellt ist.
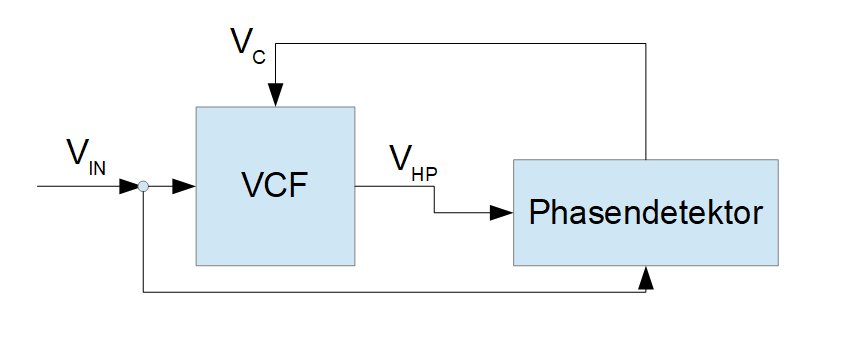
Abb. 45 Regelkreislauf eines Selftuned Filters¶
Die initiale Kontrollspannung (\(V_{C0}\)) lässt sich mit folgender Formel (vgl. Gl. 27) berechnen. Hierbei Sind \(R_{10}, R_{11}\) und \(V_3\) in Abb. 44 eingezeichnet und \(U_{Amp}\) ist die Versorgungsspannung von \(U_4\) der selben Abbildung.
Simulation¶
Für die Simulation der Schaltung standen zwei Simulationssoftware, Tina-TI von Texas Instruments und LTspice von Analog Devices, zur Verfügung, welche auch im Laufe des Projektes verwendet wurden. Mit der Letzterer wurden die Hauptsimulationen durchgeführt. Zunächst wurde die Schaltung aus dem Experiment 04 in der Simulation aufgebaut und Simuliert, um die Funktionsweise des Filters besser zu verstehen. In der Abb. 46 ist der Schaltplan dargestellt.
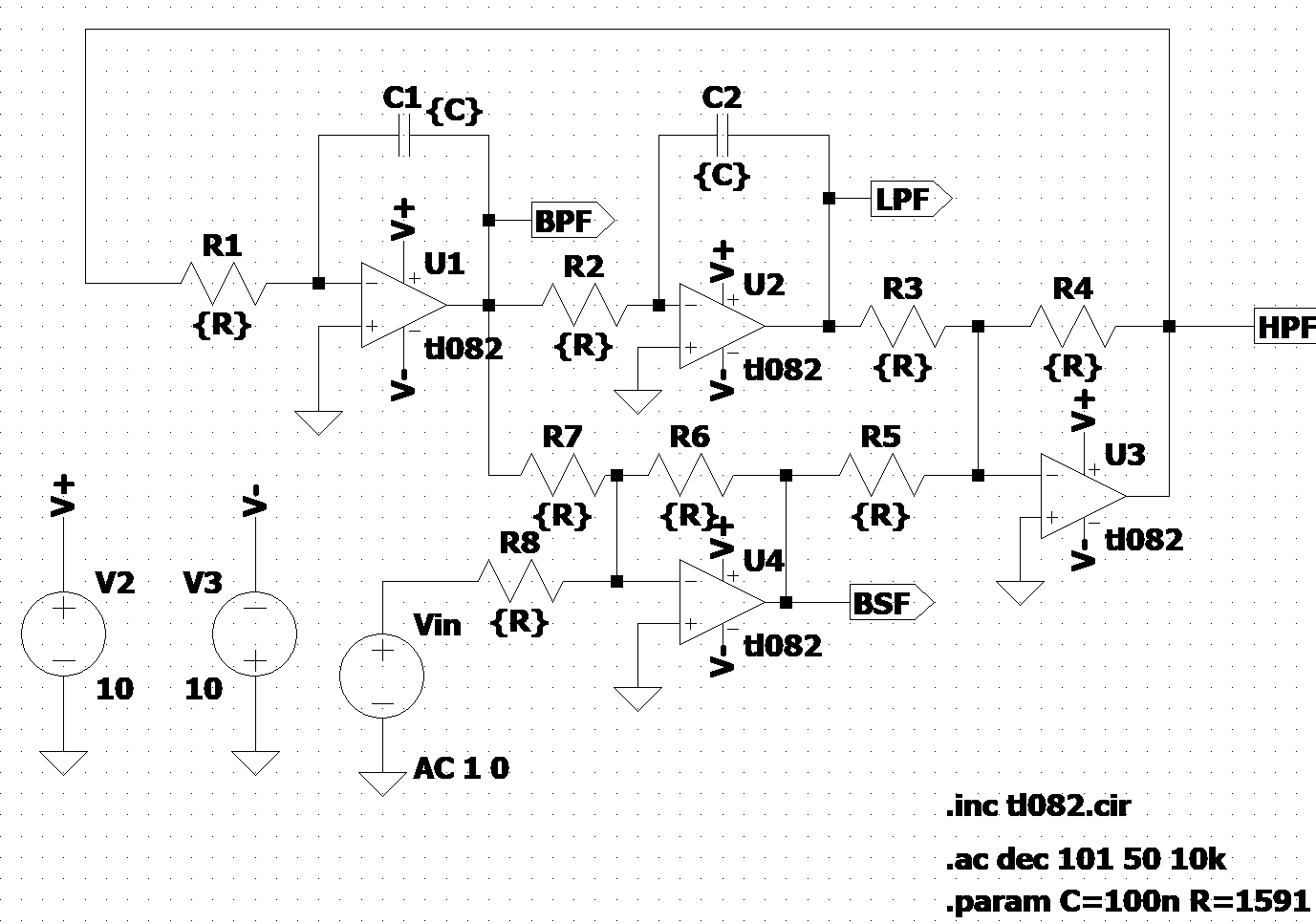
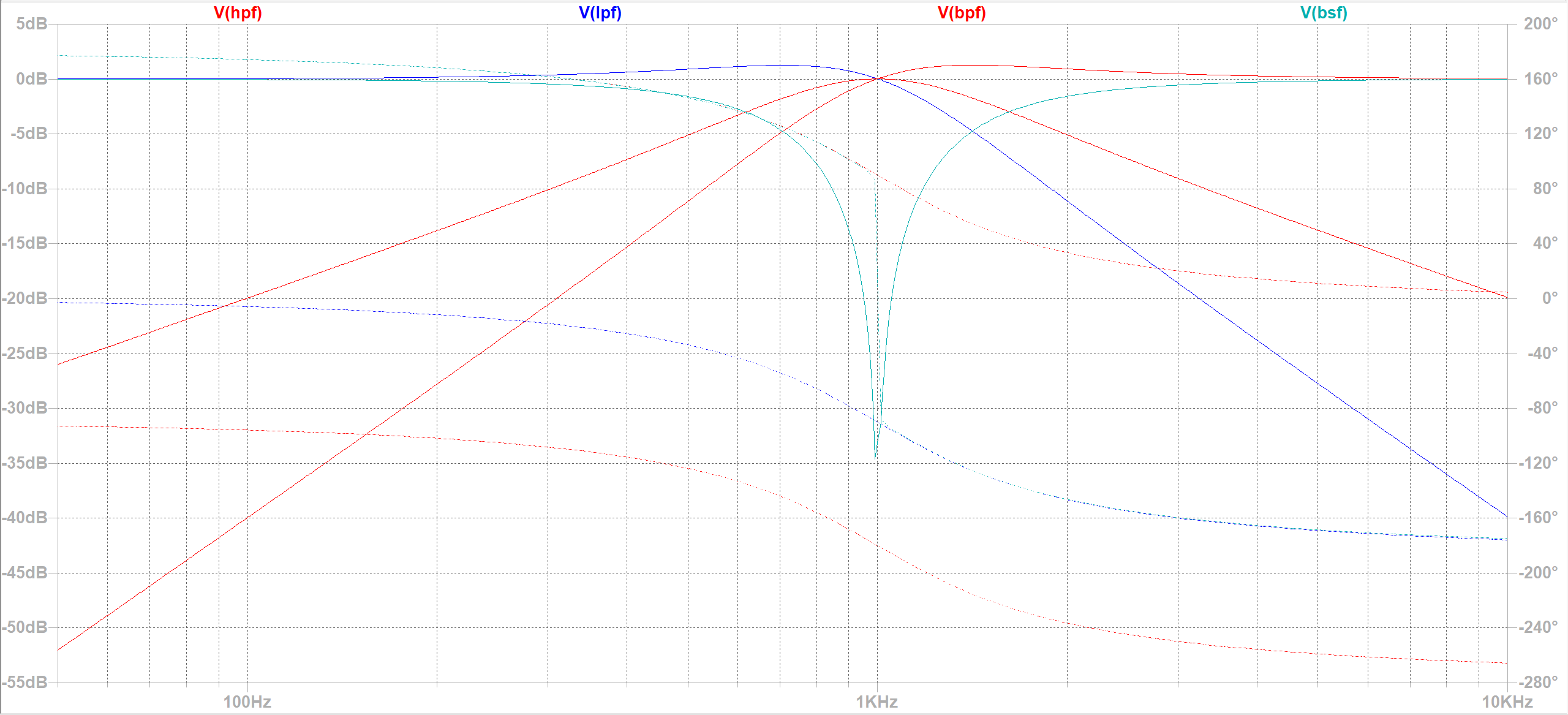
Gespeist wird über \(V_{in}\) ein Sinussignal mit der Frequenz 1 kHz und der Amplitude 1 V. An den jeweiligen Ausgängen werden die Filterausgänge abgegriffen, welche in der Abb. 47 dargestellt werden.
Die Grenzfrequenzen werden mit der Formel Gl. 28 bestimmt.
Da in der Schaltung nur die beiden Kondensatoren frequenzabhängig sind, wird die Grenzfrequenz über die Zeitkonstante \(\tau,(\tau = R \cdot C)\) eingestellt. Über den Widerstand R7 wird die Güte Q eingestellt und R8 dient dazu, den Verstärkungsfaktor einzustellen. All die anderen Widerstände haben denselben Wert wie der Widerstand R1.
Wesentliche Änderung im Experiment 5 zum Experiment 4 besteht darin, dass nun sich die Schaltung automatisch auf die Grenzfrequenz einstellen soll. Dazu werden mehrere analoge Multiplizierer benötigt, sowie eine Phasendetektorschaltung, die mit Hilfe eines Integrators realisiert wird. In Abb. 48 wird der Schaltplan abgebildet.
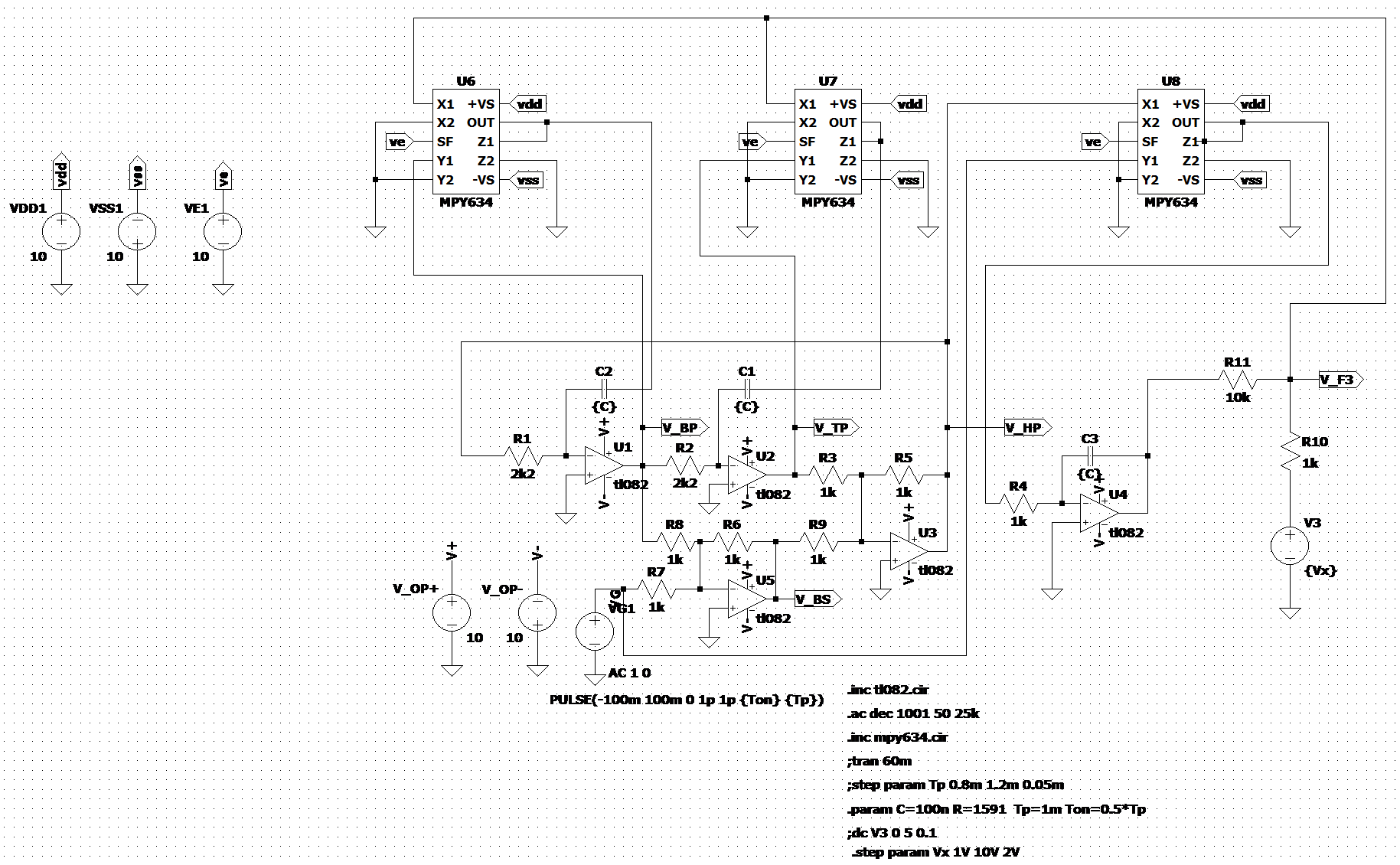
Gespeist wird ein 1 kHz Rechtecksignal mit der Amplitude 100 mV. Für die bessere Übersicht wurden einige Komponente wie Widerstände oder auch Spannungsquellen parametrisiert. Über die Widerstände R10 und R11 wird die Range (Bandbreite) eingestellt, in der sich das Filter Einstellen kann. Über die Spannungsquelle V3 wird die Referenzspannung eingestellt. Die maximale Spannung liegt bei 10 V, was auf die Referenzspannung der Multiplizierer zurück zu führen ist (beträgt auch 10 V).
Messung¶
Für den Aufbau der Schaltung wurde das ASLK PRO Board verwendet. In der Abb. 49 ist der Aufbau abgebildet.
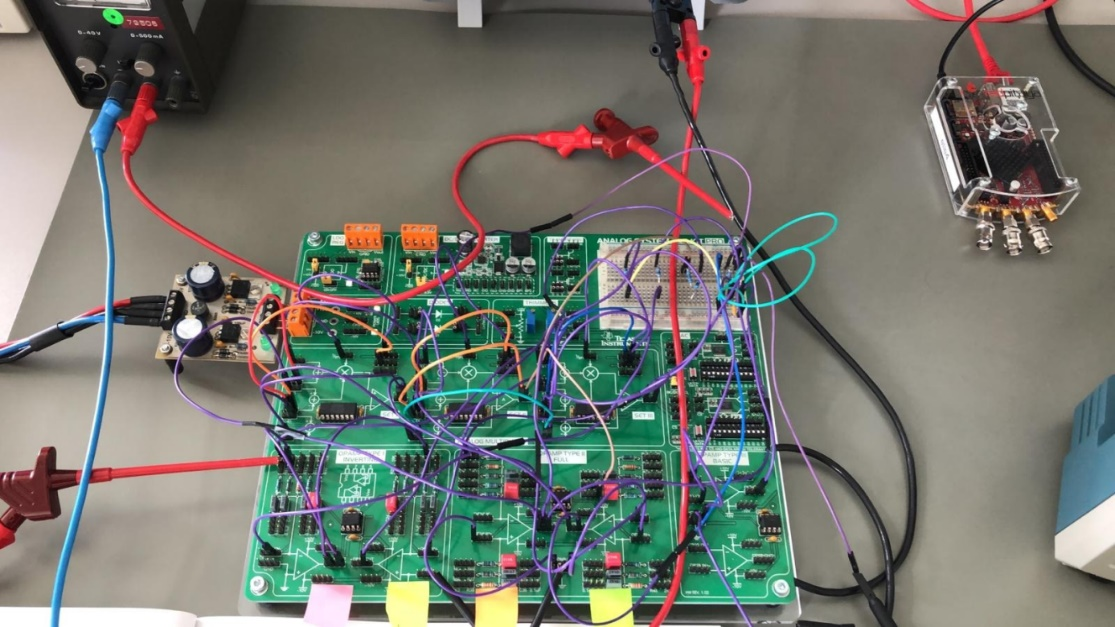
Abb. 49 Messaufbau auf dem ASLK PRO¶
Wie in der Abb. 49 zu sehen ist, wurden fast alle Bauteile, die auf dem ASLK PRO Board verbaut sind, für den Schaltungsaufbau verwendet. Da die Bauteile einzeln auf dem Board vorhanden sind, wurde die Bauteile mit Hilfe von Jumper-Wire verbunden. Durch die Verwendung der Drähte konnte am Anfang keine stabile Messung durchgeführt werden. Nach kleineren Fehlerbehebungen konnten Messungen durchgeführt werden. In den nachfolgenden Abbildungen sind die gemessenen und die theoretisch ermittelten Signalverläufe dargestellt.
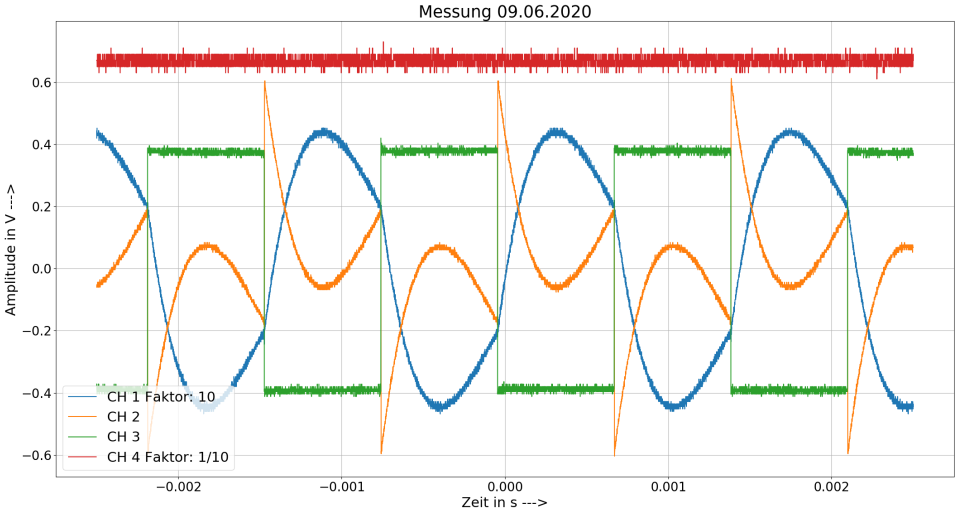
Abb. 50 Messung im Labor¶
Grüne Linie -> Eingangssignal
Blaue Linie -> Bandpasssignal
Orangene Linie -> Bandsperre
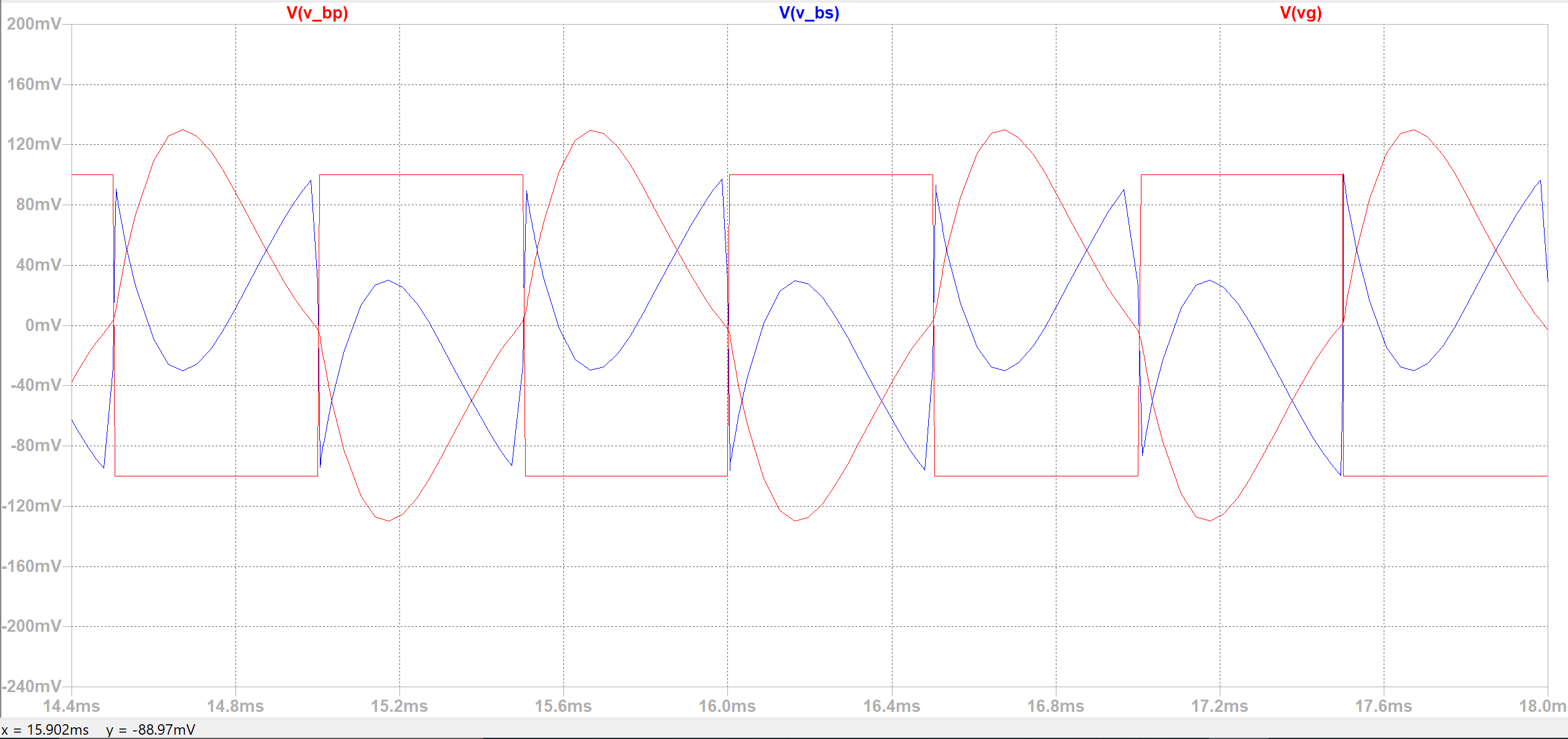
Abb. 51 Messergebnis aus der Simulation¶
Auf den Bildern ist deutlich zu erkennen, dass die Simulation mit den gemessenen Werten übereinstimmt. Bei weiteren Messungen zur Verifikation der Schaltung kamen immer wieder Probleme mit der Verdrahtung der Schaltung. So konnten nicht alle Messungen aus dem Aufgabenblatt durchgeführt werden. Für die weitere Verifizierung der Schaltung wurde vorgeschlagen die Platine neu zu ätzen, um die Problematik mit der Verdrahtung auszuschließen.
Fazit¶
Das Experiment baut auf dem Experiment 4 auf. Es wurden verschiedene Bestandteile untersucht, dazu gehört der Integrator, der Multiplizierer, der spannungsgesteuerte Integrator und der Phasendetektor. Das grundsätzliche Verhalten vom „self-tuning“ Filter wurde ersichtlich. Es wurde festgestellt, dass der Filter von Phase und Mittenfrequenz abhängig ist.
Trotzdem kam es zu Abweichungen der Messergebnisse von den simulierten Daten. Es ist darauf zu schließen, dass der Schaltungsaufbau mit einem riesigen Kabelmanagement auf dem ASLK PRO Board daher geht.
Ausblick¶
Die Schaltung aus Experiment 05 könnte auf eine Platine gelötet werden, um mögliche Schaltungsfehler zu minimieren. Weiterhin könnte zu dem Multiplizierer noch ein Offset hinzugefügt werden, um negative Offsets auszugleichen. Außerdem kam die Frage auf „Warum muss das Ausgangssignal an Z zurückgeführt werden?“ Sowie zur Beschreibung der Rückkopplung am Ende der Schaltung könnte eine Formel erstellt werden, die das Verhalten beschreibt.
Literaturverzeichnis¶
Energie des magnetischen Feldes | LEIFIphysik. 11.06.2020. URL: \url{https://www.leifiphysik.de/elektrizitaetslehre/elektromagnetische-induktion/grundwissen/energie-des-magnetischen-feldes} (visited on 11.06.2020).
Texas Instruments Incorporated. Mpy634. Wide BandwidthPRECISION ANALOG MULTIPLIER, 2020.
Texas Instruments and Incorporated. Understanding the Terms and Definitions of LDO Voltage Regulators. URL: \url{https://www.ti.com/lit/an/slva079/slva079.pdf?ts=1591961137391} (visited on 12.06.2020).
Marlene Marinescu and Jürgen Winter. Basiswissen Gleich- und Wechselstromtechnik: Mit ausführlichen Beispielen ; [Bachelor geeignet! Friedr. Vieweg & Sohn Verlag | GWV Fachverlage GmbH Wiesbaden, Wiesbaden, 2., überarbeitete auflage edition, 2008. ISBN 978-3-8348-0344-3.
K.R.K. Rao and C. P. Ravikumar. Analog system lab kit pro manual. aslk-pro-manual-v103, June 2012.
K. Sasikala and S. Pradeep Kumar Dr. E. N. Ganesh. Design of adaptive analog self tuning filters. International Journal of Management, Technology and Engineering, 2019. https://www.researchgate.net/publication/330579445_Design_of_Adaptive_Analog_Self_Tuning_Filters Zugriff: 23.06.2020.
Ulrich Tietze, Christoph Schenk, and Eberhard Gamm. Halbleiter-Schaltungstechnik: Neuer Teil: nachrichtentechnische Schaltungen. Springer, Berlin, 12. aufl. edition, 2002. ISBN 3540428496.
Prof. Dr.-Ing. Thorsten Völker. Skript: Leistungselektronik: Hochschule Bremen, Elektrische Energietechnik. 01. Oktober 2014.
TEXAS INSTRUMENTS. Analog System Lab Kit PRO Manual. URL: \url{https://download.mikroe.com/documents/specials/educational/aslk-pro/aslk-pro-manual-v103.pdf}.
TEXAS INSTRUMENTS. TPS40200: Wide Input Range Non-Synchronous Voltage Mode Controller. URL: \url{http://www.ti.com/lit/ds/symlink/tps40200.pdf}.
TEXAS INSTRUMENTS. Understanding output voltage limitations of DC/DC buck converters. URL: \url{https://www.ti.com/lit/an/slyt293/slyt293.pdf}.