Experiment 12: Parameterstudie eines DC-DC Konverters¶
Abstract¶
Das vorliegende Experiment zeigt die Untersuchung eines DC-DC-Konverters mit dem TPS40200. Es wird das Verhalten der Ausgangsspannung bei verschiedener Belastung sowie verschiedener Eingangsspannung gezeigt. Weiterhin wird auf den Tastgrad des PWM-Signals eingegangen. Der Gleichstromsteller wird sowohl über Simulationen als auch im Labor untersucht. Es wird gezeigt, dass es Abweichungen zwischen Simulation und Messung geben kann. Außerdem werden die theoretischen Grundlagen des Experimients kurz dargestellt.
Einleitung¶
Um die Spannung über einem Verbraucher anzupassen, kann ein Spannungsteiler verwendet werden. Diese Methode erzielt jedoch einen schlechten Wirkungsgrad. Um einen möglichst energieeffizienten Wirkungsgrad zu erzielen, erfolgt die Spannungswandlung durch periodisch schaltende Wandler.
Der Begriff Gleichstromsteller ist auch als DC/DC - Wandler bekannt, da durch eine geschaltete Gleichspannung - je nach Bedarf - eine höhere, niedrigere oder sogar negative Gleichspannung entsteht. Im vorliegenden Experiment soll nun eine Parameterstudie eines DC-DC Wandlers vorgenommen werden.
Dafür wird das On-Board-Evaluationsmodul TPS40200 auf dem ASLK PRO Kit untersucht. Es handelt sich hierbei um einen Abwärtswandler (Step-Down-Converter). In der folgenden Schaltung wird dies durch eine Pulsweitenmodulation (PWM) mit einer Frequenz von ca. 200 kHz durchgeführt. Durch unterschiedliche Puls-Pausen-Verhältnisse lassen sich verschiedene Ausgangsspannungen erzeugen. Die jeweilige Pulsweite \(t_{on}\) und \(t_{off}\) beschreiben die Ein- bzw. Ausschaltzeit des Abwärtswandlers ([10], S.109).
Zu Beginn wird die Theorie eines klassischen Abwärtswandlers in Kapitel Theoretische Vorbetrachtung erläutert, um so die Eigenschaften der einzelnen Bauteile und deren Abhängigkeit zueinander zu verstehen. Des Weiteren werden die verwendeten Eigenschaften des TPS40200 in Eigenschaften des TPS40200 beschrieben. Daraufhin folgt die theoretische Simulation des Schaltungsaufbaus unter den selben Konfigurationen, wie unter Laborbedingungen, wie im Kapitel Simulations- und Messaufbau beschrieben. Im Labor wird der DC-DC Wandler bei folgenden Konfigurationen untersucht:
bei konstanter ohmscher Last: Messen verschiedener Spannungen
bei konstanter ohmscher Last und variierender Eingangsspannung: Untersuchung der Spannungsstabilität am Ausgang
bei variierender ohmscher Last und fester Eingangsspannung: Messen des Ausgangsstroms
bei variierender Eingangsspannung: Beobachtung des Tastgrads der PWM-Wellenform
Die resultierenden Ergebnisse der Messungen im Labor werden im Kapitel Ergebnisse dargelegt. Darauf aufbauend werden in Diskussion die messtechnisch ermittelten Ergebnisse mit den Simulationsdaten diskutiert.
Abweichend der üblicherweise im deutschen verwendeten Angabe des Formelzeichens U der physikalischen Größe der elektrischen Spannung wird in Experiment 12 diese mit dem Formelzeichen V angegeben. Hierfür wurde sich entschieden, um Verwechslungen zwischen den im Text angegebenen Quellen und diesem Dokument zu vermeiden.
Theoretische Vorbetrachtung¶
Das Evaluierungsmodul (EVM) mit dem nicht synchronen Abwärtswandler TPS40200 ist auf dem ASLK PRO zu finden, Abb. 133 zeigt den Schaltplan des EVM.
Ein nicht synchroner Abwärts- oder auch Aufwärtswandler wird dadurch charakterisiert, dass eine Freilaufdiode den weiteren Stromfluss bei nicht aktivem Schaltsignal (\(t_{off}\) des Duty Cycles) gewährleistet. Ein synchroner Wandler hätte hingegen einen zusätzlichen MOSFET anstatt der genannten Diode, welcher durch ein PWM-Signal gesteuert wird. Der Vorteil eines solchen Wandlers ist der bessere Wirkungsgrad.
Die Kenndaten des TPS40200 erlauben eine maximale Eingangsspannung von bis zu 52 V und eine maximale Ausgangsspannung von \(V_{in} - 10V\) bis \(V_{in}\). Diese variieren ebenfalls mit dem für die Ausgangsspannung gewählten Schaltungsentwurf. Da der hier beschriebene Versuch sich auf den bereits fertigen Schaltungsentwurf des ASLK PRO-Boards bezieht, werden im Folgenden nur die verwendeten Spezifikationen erläutert. Der verwendete Abwärtswandler (Buck-Konverter) hat ebenfalls Funktionen, die im Datenblatt ([12], S.11ff) beschrieben sind, allerdings wurden diese nicht im fertigen Layout mit aufgeführt und sind somit nicht relevant für die zu betrachtende Schaltung.
Das hier verwendete EVM wird mit einer Eingangsspannung von 6 V bis 15 V betrieben. Die konstante Ausgangsspannung kann mit Hilfe des Jumpers JP8 zwischen 3,3 V oder 5 V eingestellt werden. In beiden Fällen beträgt der Ausgangsstrom minimal 125 mA und maximal 2,5 A.
Grundaufbau des Abwärtswandlers¶
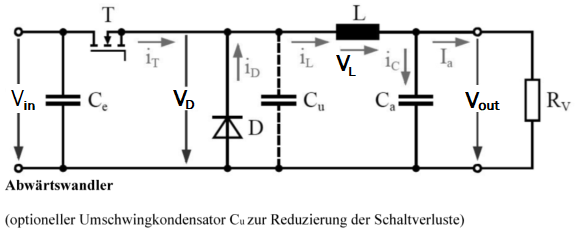
Abb. 129 Schaltungsaufbau eines DC-DC-Konverters ([10], S.115)¶
In Abb. 129 ist der grundlegende Aufbau eines Abwärtswandlers gezeigt. Aus der Schaltung wird schnell klar, dass die Ausgangsspannung eines Abwärtswandlers immer im Bereich von 0 V bis \(V_{in}\) liegt. Die Spule ist eines der wichtigsten Elemente in diesem Schaltungsaufbau, denn durch sie wird zugeführte Energie gespeichert, wenn der MOSFET leitet und die gespeicherte Energie wird abgegeben, wenn der MOSFET sperrt. Hinzu kommt, dass sie einem schnellen Stromanstieg durch ihre Eigeninduktion entgegenwirkt, denn der Spulenstrom folgt dem Induktionsgesetz und schützt so die Last vor hohen Stromspitzen. Die Induktivität der Speicherdrossel wird in den meisten Fällen so gewählt, dass der geplante minimale Ausgangsstrom nicht unterschritten wird. Ebenfalls ist bei der Induktivitätswahl darauf zu achten, dass der magnetische Sättigungsstrom der Spule nicht überschritten wird, da je nach Spulentyp mit Erreichen der magnetischen Sättigung der Induktivitätswert abnimmt. Dies würde sich negativ auf unsere abgebende Energie der Spule auswirken, wie die Gl. 45 bestätigt [1]. Ein weiterer sehr wichtiger Faktor der zu wählenden Spule ist der parasitäre Serienwiderstand (ESR), da die Verlustleistung der Spule minimal zu halten ist, um mit einem optimierten Wirkungsgrad zu arbeiten ([9], S.947).
Die benötigte Induktivität lässt sich deshalb wie folgt ermitteln: \(I_{out,min}\) beschreibt hier den minimalen \(I_{SpitzeSpitze}\) Rippelstrom, welcher das Zweifache des angegebenen minimalen Stormes beträgt ([9], S.947):
Des Weiteren ist der Glättungskondensator ebenfalls essentiell, um die Welligkeit der Ausgangsspannung einzustellen. Um die parasitären Serienwiderstände des Kondensators gering zu halten, schaltet man meist einen oder mehrere Elektrolytkondensatoren und keramische Kondensatoren parallel. Dies hat zur Folge, dass die Verlustleistung der Parallelschaltung der Kondensatoren verringert wird. Die benötigte Kapazität errechnet sich nach Gl. 47, wobei \(\Delta U_{out}\) die maximal auftretende Ausgangsrippelspannung beschreibt ([9], S.947).
Texas Instruments hat für dieses Layout die Ausgangskapazität anders ermittelt und gibt diese laut dem Datenblatt ([12], S.23) mit einer Kapazität von 165 \(\mu F\) an. Dies wird nicht ganz schlüssig bei einem Blick auf den Schaltplan Abb. 133. An dem Schaltplan wird sichtbar, dass hier durch mehrere parallel geschaltete Kapazitäten die parasitären Widerstände gering gehalten werden.
Die Diode des Abwärtswandlers sorgt dafür, dass die gespeicherte Energie aus der Spule abgegeben werden kann, wenn der MOSFET nicht mehr leitet. Die Diode sollte mindestens eine Durchbruchspannung von \(2 V_{in}\) besitzen. Zu beachten ist, dass der maximale Ausgangsstrom und die Schwellspannung der Diode nicht zu groß sein sollten, denn wenn der MOSFET sperrt, setzt sich die Ausgangsspannung wie folgt zusammen:
Ein weiterer wichtiger Punkt ist die Schaltfrequenz des MOSFETs. Sollte diese zu klein gewählt sein, so entsteht der so genannte „lückende Strombetrieb“. Dieser ist stets zu vermeiden. Deshalb befindet sich die übliche Schaltfrequenz zwischen 20 kHz bis 200 kHz, um den gewollten „nicht lückenden Strombetrieb“ zu erhalten.
Durch die genannten Bauteile und ihre Eigenschaften wird das Grundprinzip des Abwärtswandlers klar: Denn durch Schalten des MOSFETs, welcher durch ein PWM-Signal angesteuert wird, ist die Ausgangsspannung ein Produkt aus dem Tastverhältnis des PWM-Signals und der angelegten Eingangsspannung. Das Tastverhältnis beschreibt das Verhältnis der Einschaltzeit zu der Periodendauer des PWM-Signals:
Somit lässt sich erkennen, dass sich die Ausgangsspannung aus dem arithmetischen Mittelwert der Eingangsspannung ergibt ([9], S.944). Anmerken lässt sich hier, dass die Ausgangsspannung bei einer festen Last als konstant angenommen werden kann. So betrachten wir die Eingangsspannung als variabel. Umgestellt zum Tastgrad ergibt sich eine Gleichung der Form \(f(x)=a/x\). Dies lässt auf einen hyperbelförmigen Verlauf des Tastgrades schließen.
Eigenschaften des TPS40200¶
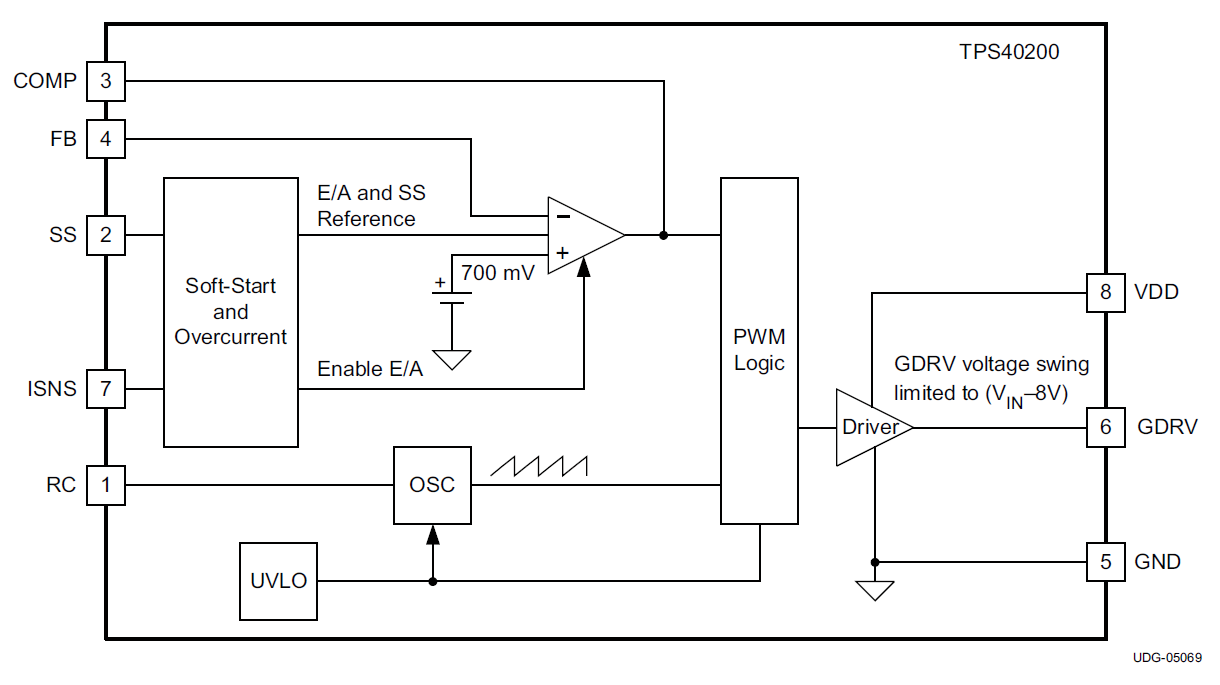
In Abb. 130 ist der grundlegende Aufbau der Halbleiterschaltung schematisch dargestellt. Dieser wird im Folgenden erläutert.
Es ist zu sehen, dass der Baustein auch über eine Soft-Start-Funktion verfügt, bei der der Ausgang einer langsam ansteigenden Soft-Start-Spannung folgt, sodass ein Überschwingen der Ausgangsspannung verhindert wird.
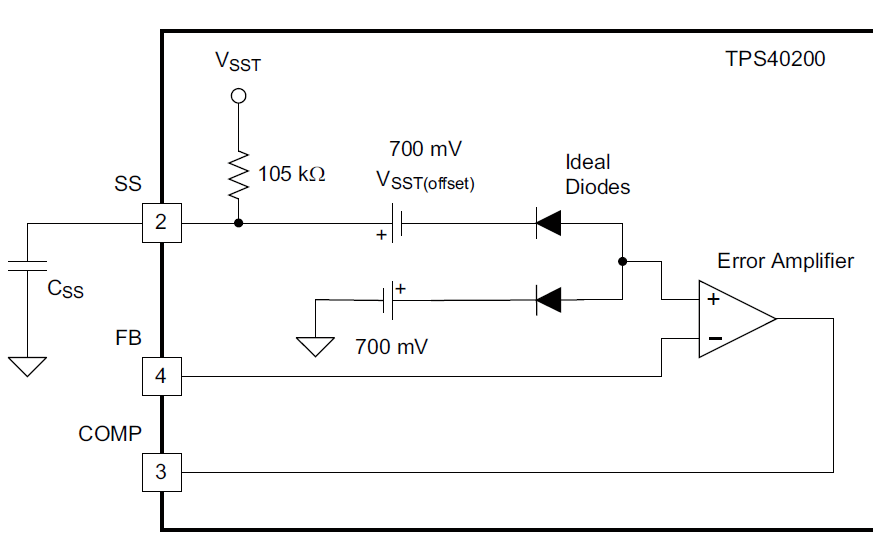
Die Anrampung der Ausgangsspannung kann, wie Abb. 131 zeigt, durch entsprechende Wahl des Kondensators \(C_{SS}\) eingestellt werden. Da die Zeitkonstante der jeweiligen Kapazität varriert, können verschiedene Anrampungen ermöglicht werden. Die Anlaufzeit ergibt sich aus folgender Formel [12] :
\(t_{SS}\) ist die erforderliche Softstartzeit in Sekunden
\(C_{SS}\) ist der Wert des Softstart-Kondensators in F
\(R_{c}\) ist der interne Sanftanlauf-Ladewiderstand (105 \(k \Omega\) nominal)
\(V_{SST}\) ist die eine interne Spannungsversorgung bis zu einem Maximum von 8 V
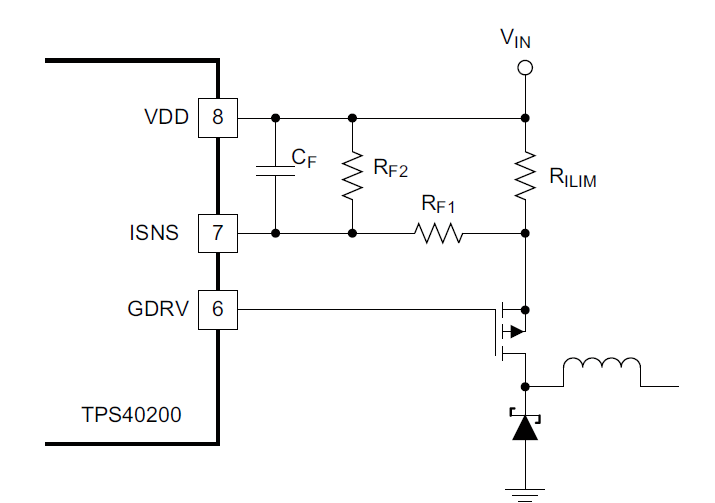
Eine weitere Eigenschaft ist die maximale Strombegrenzung durch die das PWM-Signal ausgeschaltet wird, um sich und die Platine vor Zerstörung zu schützen (Abb. 132). Wenn der FET eingeschaltet ist und über \(R_{ILIM}\) ein Abfall von \(V_{ILIM} = 100 mV\) oder mehr vom VDD-Pin zum ISNS-Pin festgestellt wird, wird ein Überstromzustand erklärt. In diesem Fall wird der FET abgeschaltet und ein intern integrierter Softstart-Kondensator wird entladen. Wenn der Softstart-Kondensator einen Pegel unter 150 mV erreicht, löscht ein Komparator das Überstrom-Zustandsflag und versucht neu zu starten. Sollte der Überstrom immer noch aktiv sein, so beginnt der Vorgang erneut. Der maximale Spitzenstrom lässt sich über
berechnen ([12], S.15). Der Widerstand \(R_{F2}\) ist für den hier vorgestellten DC-DC-Wandler als unendlich anzunehmen, wodurch die Strombegrenzung alleine von \(V_{ILIM}\) und \(R_{ILIM}\) abhängt. So kann bei den hier verwendeten Parametern ein Spitzenstrom von 3,33 A in der Spule fließen. Von diesem sollte beim Design eine Toleranz von 25 % sowie der Rippelstrom von 0,125 A berücksichtigt werden([12], S.24). Für die hier verwendeten Parameter kann somit maximal ein Strom von 2,54 A fließen.
Die Ausgangsspannung verringert sich bei steigendem Laststrom. Dies ist auf die damit verbundenen ansteigenden Verlustleistungen von den parasitären Widerständen und die PN-Übergänge der Bauelemente zurückzuführen ([5] S. 10) ([13] S. 12).
Es gibt noch weitere relevante Einstellungen, die auf dem EVM-Board bereits realisiert worden sind, wie z.B. die Realisierung \(V_{CC}\) Spannungsunterschreitung. Hierfür wird auf das Datenblatt des TPS40200 verwiesen ([12] S.12).
Die Betriebsfrequenz des Abwärtswandlers wird durch einen externen Widerstand \(R_{201}\) bestimmt, der vom RC-Pin an VDD angeschlossen ist sowie durch einen Kondensator \(C_{213}\), der vom RC-Pin an Masse angeschlossen ist (siehe Abb. 133). Diese Verbindung und die beiden Oszillatorkomparatoren im Inneren des Geräts bestimmen die Oszillatorfrequenz nach folgender Gleichung:
Da der Abwärtswandler varrierende Lasten ermöglicht, erfordert die Ausgangsspannung eine Regelung. In Abb. 130 sieht man, dass der TPS40200 eine Referenzspannung von 700 mV für die Regelung der Rückkopplungsschleife benötigt. Diese Angabe besitzt bereits eine Ungenauigkeit. So ist ([12], S.18) zu entnehmen, dass diese bei 696 mV liegt.
Wie genau die Regelung funktioniert, wurde im Versuch 9: DC-DC Konverter anschaulich beschrieben. Dazu wird ein Spannungsteiler an die Ausgangsspannung angeschlossen und der mittlere Abgriff wird auf den PIN „FB“ gelegt. Eine Ausgangsspannung kann wie folgt über den Rückkopplungsfaktor \(\beta\) eingestellt werden ([11], S.64):
Die Änderung der Ausgangsspannung kann über JP8 in Abb. 133 erreicht werden. Bei Betrachtung wird auch erkenntlich, dass die Ausgangsspannung zum Regeln der Ausgangsspannung verwendet wird. Hierbei wird das Prinzip eines nichtinvertierenden Verstärkers genutzt. Nach umstellen von Gl. 53 zu \(V_{out}\) kann dies folgendermaßen berechnet werden:
Der benötigte Parallelwiderstand zwischen \(R_{209}\) und \(R_{211}\) kann über
ermittelt werden.
Diesbezüglich kann durch einfaches Umformen der Parallelschaltung \(R_{211}\) errechnet werden:
Der Rückkopplungsfaktor \(\beta\) kann durch Änderung des Rückkopplungswiderstands \(R_{209}\) geändert werden, um so die Ausgangsspannung festzulegen. Es ist jedoch nicht möglich, auf dem ASLK PRO den Widerstand \(R_{209}\) zu ändern. Dies könnte jedoch durch den Anschluss eines externen Widerstandes zwischen der Klemme TP8 und Ground erreicht werden.
Der Ausgangsstrom darf zwischen 0,125 A und 2,5 A betragen ([12], S. 20, Tabelle 1). Über das ohmsche Gesetz können wie folgt die Grenzwerte der ohmschen Last ermittelt werden:
Somit wurden alle nötigen Parameter für den Schaltungsentwurf des Abwärtswandlers TPS40200 ermittelt.
Simulations- und Messaufbau¶
Der Versuchsaufbau gliedert sich in zwei Abschnitte. Der erste Abschnitt behandelt die Simulation der Schaltung mit Hilfe des Programms TINA-TI und dazu nötigen Berechnungen. Der zweite Abschnitt beschäftigt sich mit dem Messaufbau vor Ort.
Die untersuchte Schaltung kann der Abb. 133 entnommen werden. Insgesamt wurden vier Simulationen und vier Messungen durchgeführt.
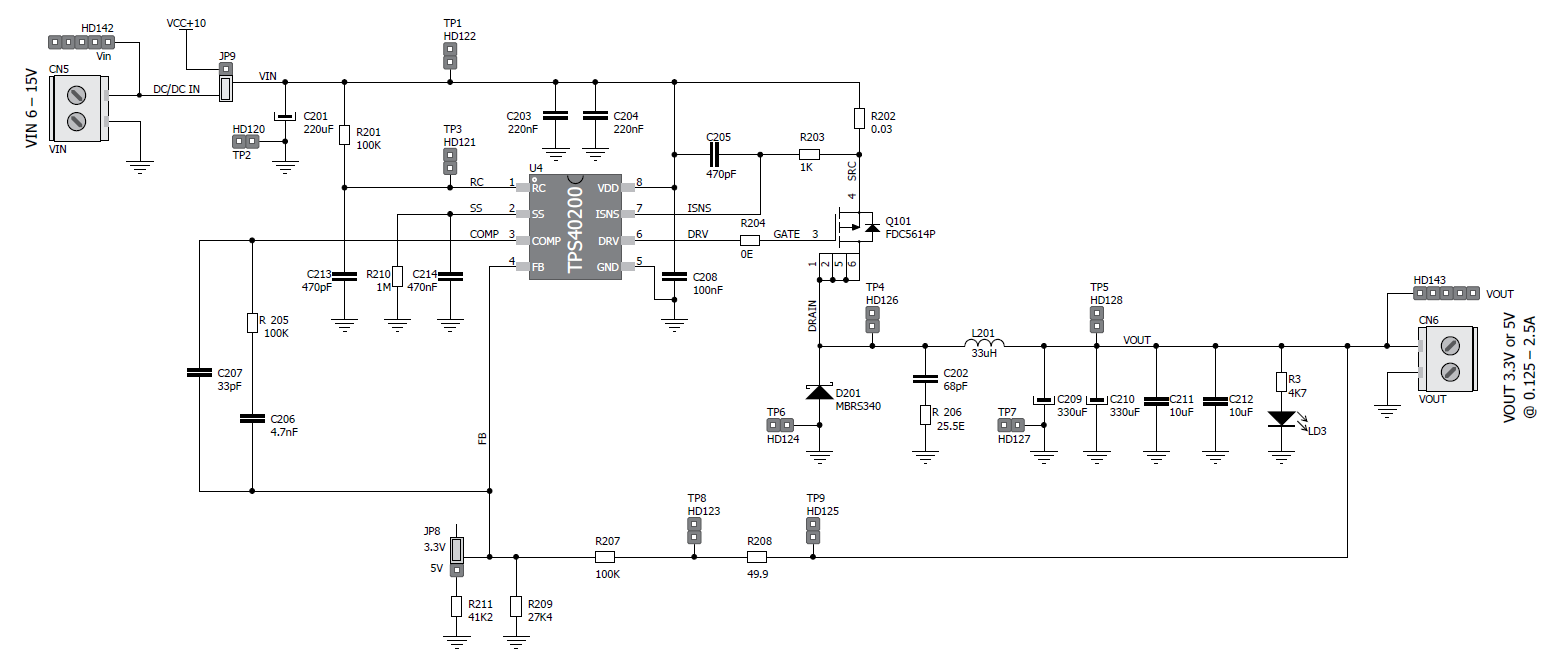
Abb. 133 Schaltnetzteil basierend auf dem TPS40200 ([11], S.64)¶
A. Simulation¶
Größtenteils wurde für die Simulation TINA-TI in Version 9.3.200.277 SF-TI verwendet. Dabei sei angemerkt, dass mit diesem Spice Simulator zwar das grundlegende Verhalten der Schaltung simuliert wird. Jedoch werden dabei nicht die physikalischen Effekte des Layouts berücksichtigt. Neben den Standardbauteilen von TINA-TI wurde der TPS40200 und der FDC5614P neu eingebunden. Für den TPS40200 verwenden wir die Rev. D, die auf der Herstellerseite von Texas Instrument zum freien Download zur Verfügung steht. Für den FDC5614 wurde ein Spice-Modell vom Hersteller OnSemi umformatiert, sodass er in TINA-TI eingebunden werden kann. Die restlichen Bauteile wurden der Standardbibliothek von TINA-TI entnommen. Die Simulationsdateien können dem Repositorium entnommen werden.
Für die Berechnung des benötigten Widerstandes zum Festlegen der 5 V Ausgangsspannung ergibt sich über Gl. 57 und Gl. 58 ein Widerstand \(R_{211}\) von 40,1 \(k \Omega\). Die verfügbaren Widerstände auf dem ASLK Pro lassen jedoch ausschließlich eine Beschaltung von 41,2 \(k \Omega\) zu.
Wellenformen¶
Es werden vier Spannungen der Schaltung simuliert:
Eingangsspannung, \(V_{in}\)
Ausgangsspannung, \(V_{out}\)
Oszillatorspannung, TP3
PWM-Signal, TP4
Dafür wird die Schaltung mit einem 20 \(\Omega\) – Widerstand belastet. Die Eingangsspannung wird auf konstante 10 V eingestellt. Um sicherzustellen, dass die Schaltung sich im eingeschwungenen Zustand befindet, wird nur der Zustand der Simulationszeit von 15 ms bis 15,1 ms dargestellt. Die Ergebnisse werden jeweils als Funktion \(u(t)\) dargestellt.
Ausgangsspannung bei fester Last¶
Um das Verhalten der Ausgangsspannung während einer variierenden Eingangsspannung zu untersuchen, wird die Schaltung mit einer Last von 20 \(\Omega\) simuliert. Die Eingangsspannung wird als Dreiecksspannung mit einem Offset von 12,5 V, einer Amplitude von 2,5 V sowie einer Frequenz von 10 Hz erzeugt. So kann ein Spannungsbereich von 10 V bis 15 V betrachtet werden. Betrachtet wird der zeitliche Ausschnitt zwischen 75 ms und 125 ms, wodurch ein Sweep von 10 V bis 15 V erreicht wird. Dargestellt wird das Ergebnis durch \(V_{out}(V_{in})\).
Ausgangsspannung und -strom bei fester Eingangsspannung und dynamischer Last¶
Die Eingangsspannung beträgt in der Simulation konstant 10 V. Die Last ist variabel und wird mit Hilfe eines spannungsgesteuerten Widerstandes umgesetzt. Dieser wurde anhand vom diesem Beispiel erstellt. Die Last verändert ihren Widerstand linear zwischen 2 \(\Omega\) und 40 \(\Omega\). Dies wird mit Hilfe eines Dreieckssignals mit einer Frequenz von 5 Hz realisiert. Betrachtet wird das Simulationsergebnis von 150 ms bis 250 ms, um so genau einmal zu beobachten, wie sich der Widerstand von 2 \(\Omega\) auf 40 \(\Omega\) erhöht. Dargestellt wird das Ergebnis durch \(V_{out}(I_{out})\).
Tastgrad¶
Der Tastgrad (eng. duty cycle) kann durch Gl. 49 berechnet werden. Da die Ausgangsspannung über die Widerstände \(R_{209}\) und \(R_{211}\) fest gewählt ist, kann angenommen werden, dass die Ausgangsspannung konstant ist. Somit hat der Tastgrad nur eine Abhängigkeit von der Eingangsspannung.
In der Simulation ist der Tastgrad durch die Spannung TP4 dargestellt. Wie auch in Abschnitt Ausgangsspannung bei fester Last wird ein Sweep der Eingangsspannung vorgenommen. Da die Simulation von TP4 nicht genügend Stützstellen besitzt, kann anhand der Simulationsdaten der Tastgrad ohne größere Abweichungen nicht zuverlässig bestimmt werden. Aus diesem Grund wird der Tastgrad über die Eingangs- und Ausgangsspannung nach Gl. 49 bestimmt. Dieses Ergebnis wird durch \(V_{in}\) in Abhängigkeit von dem Tastgrad dargestellt.
Messaufbau¶
Wie zuvor beschrieben, wird für die Versuche das ASLK (Analog System Lab Kit) Pro der Firma MikroElektronika für den Messaufbau verwendet. Auf diesem befindet sich die in Abb. 133 genannte Schaltung. Betrieben wird das Board mit einer symmetrischen Spannungsversorgung von 10 V. Als Messinstrument wird ein 4-Kanal Oszilloskop verwendet. Auf dem ASLK wird der JP8 so gesteckt, dass eine Ausgangsspannung von 5 V zu erwarten ist. Die Darstellungsarten entsprechen in jedem Schritt der Darstellungsart in der Simulation.
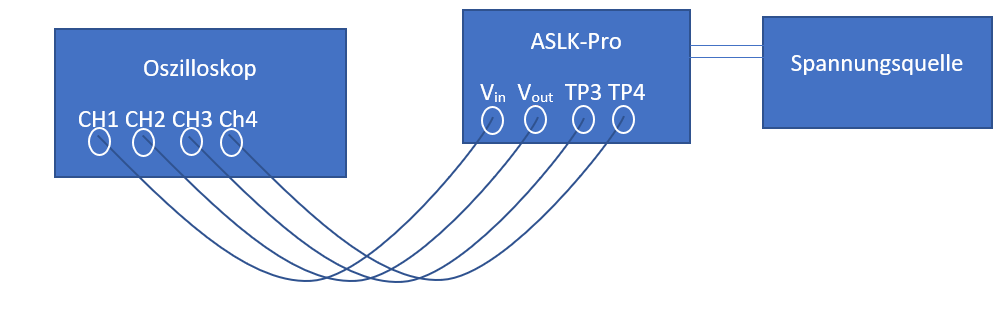
Abb. 134 Messaufbau der praktischen Messung¶
Wellenformen¶
Der Jumper JP9 wird so gesteckt, dass die Schaltung mit konstant 10 V Eingangsspannung betrieben wird. Anschließend wurde mit dem 4-Kanal-Oszilloskop die Eingangs- und Ausgangsspannung sowie TP3 und TP4 gemessen. Die Messung erfolgt über einen Zeitraum von 100 \(\mu s\). Belastet wird die Schaltung wie in der Simulation mit 20 \(\Omega\).
Ausgangsspannung bei fester Last¶
Die Last bleibt unverändert. Der Jumper JP9 wird so gesteckt, dass die Schaltung extern über CN5 betrieben werden kann. Hier wurde ein Funktionsgenerator angeschlossen. Dieser erhöht die Spannung in 0,5 V Schritten von 10 V bis 15 V. Gemessen wird die Eingangs- und Ausgangsspannung. Für jeden 0,5 V Schritt werden jeweils 31250 Werte aufgezeichnet, woraus im Nachgang der Mittelwert gebildet wird.
Ausgangsspannung und -strom bei fester Eingangsspannung und dynamischer Last¶
Um die Ausgangsspannung und den Ausgangsstrom zu messen, werden wieder konstante 10 V eingespeist. An die Last wird in Reihe ein 1 \(\Omega\) Shunt-Widerstand sowie eine verstellbares Schiebepotentiometer angeschlossen. Gemessen wird die Spannung über die gesamte Last sowie über dem Shunt-Widerstand. Das Ohm’sche Gesetz \(U=R I\) macht deutlich, dass in diesem Fall die gemessene Spannung über dem Shunt-Widerstand dem Ausgangsstrom gleicht.
Tastgrad¶
Die Bestimmung des Tastgrades erfolgt wie zuvor in Abschnitt Tastgrad aus der gemessenen Eingangs- und Ausgangsspannung. Grund für diese indirekte Bestimmung ist, dass die im Oszilloskop integrierte Duty-Cycle-Funktion ungenau wird, sobald die Flanken des Rechtecksignals keine lineare Steigung mehr aufweisen, sondern Spannungsspitzen enthalten.
Ergebnisse¶
Im Folgenden werden die simulierten Werte mit den messtechnisch ermittelten Werten verglichen und dargestellt.
Simulierte und messtechnische Wellenformen¶
Die Wellenformen sind in Abb. 135 zu erkennen. Aus Darstellungsgründen wird die Ausgangsspannung in zwei Plots aufgeteilt.
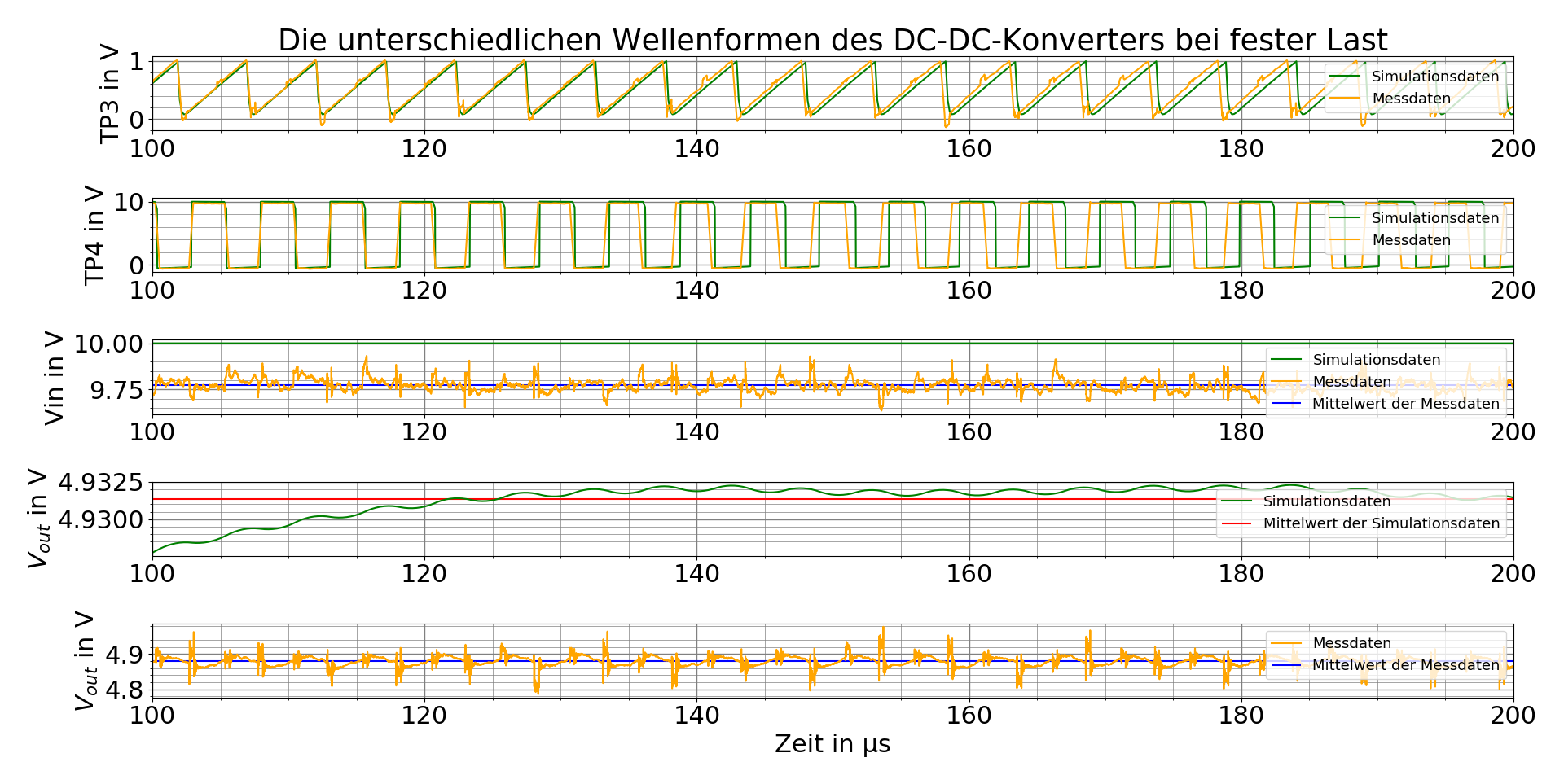
Abb. 135 Simulierte und messtechnisch ermittelte Wellenformen bei einer Last von 20 \(\Omega\) - Oszillatorspannung TP3, PWM-Signal TP4 , Ausgangsspannung \(V_{out}\) und Eingangsspannung \(V_{in}\)¶
Grundlage für die folgenden Ausführungen zum TP3 und TP4 Plot sind folgende Frequenzen, die aus den jeweiligen Daten ermittelt wurden:
Daten |
bei 100 \(\mu s\) |
bei 200 \(\mu s\) |
|---|---|---|
Simulation |
197,03 kHz |
194,79 kHz |
Messdaten |
200,08 kHz |
196,42 kHz |
Im ersten und im zweiten Plot von TP3 und TP4 ist zu erkennen, dass sich die Frequenz der Simulationsdaten am Anfang des Plots, bei 100 \(\mu s\), von den der Messdaten nicht unterscheidet. Diese weisen jedoch am Ende des Plots, bei 200 \(\mu s\), eine Differenz zueinander von 1,63 kHz auf. Man kann augenscheinlich nicht erkennen, dass sich die Frequenz der Mess- wie auch der Simulationsdaten über die Zeit ändert. Bei den Simulationsdaten ergibt sich dabei über einen Zeitraum von 100 \(\mu s\) eine Differenz von 2,24 kHz. Bei den Messdaten hingegen ergeben sich über den gleichen Zeitraum 3,66 kHz.
Im dritten Plot von der Eingangsspannung \(V_{in}\) ist ersichtlich, dass die Simulation mit einer idealen glatten Gleichspannung von 10 V durchgeführt wurde. Hingegen ist bei den Messdaten zu erkennen, dass die Eingangsspannung \(V_{in}\) keine glatte Gleichspannung ist. Der Mittelwert dieser Spannung liegt bei 9,755 V. Daraus ergibt sich eine Differenz von 0,245 V zwischen dem Mittelwert und der Simulationsgleichspannung.
Im vierten Plot von \(V_{out}\) ist zu erkennen, dass die sich ergebende simulierte wellige Ausgangsspannung typisch der eines DC-DC Wandlers ist (vgl. DC-DC Konverter). Der Mittelwert dieser Spannung ergibt ca. 4,9315 V. Im letzten Plot von \(V_{out}\) sind die Messdaten zu sehen. Auffällig sind hier die Spannungsspitzen im typischen welligen Verlauf der Ausgangsspannung. Diese Spannungsspitzen befinden sich an der Stelle, an der sich in TP4 die Signalflanken befinden. Ansonsten ist der Mittelwert der Ausgangsspannung mit 4,88 V geringer als die simulierte, was eine Differenz von 51,5 mV ergibt.
Simulierte und messtechnische Ausgangsspannung bei fester Last¶
Bei einer festen Last von 20 \(\Omega\) wird die Eingangsspannung in einem Bereich von 10 V bis 15 V dargestellt sowie die zugehörige Ausgangsspannung. Die Ausgangsspannung variiert, weshalb zusätzlich der Mittelwert ermittelt und dargestellt ist. Dies ist Abb. 136 zu entnehmen.
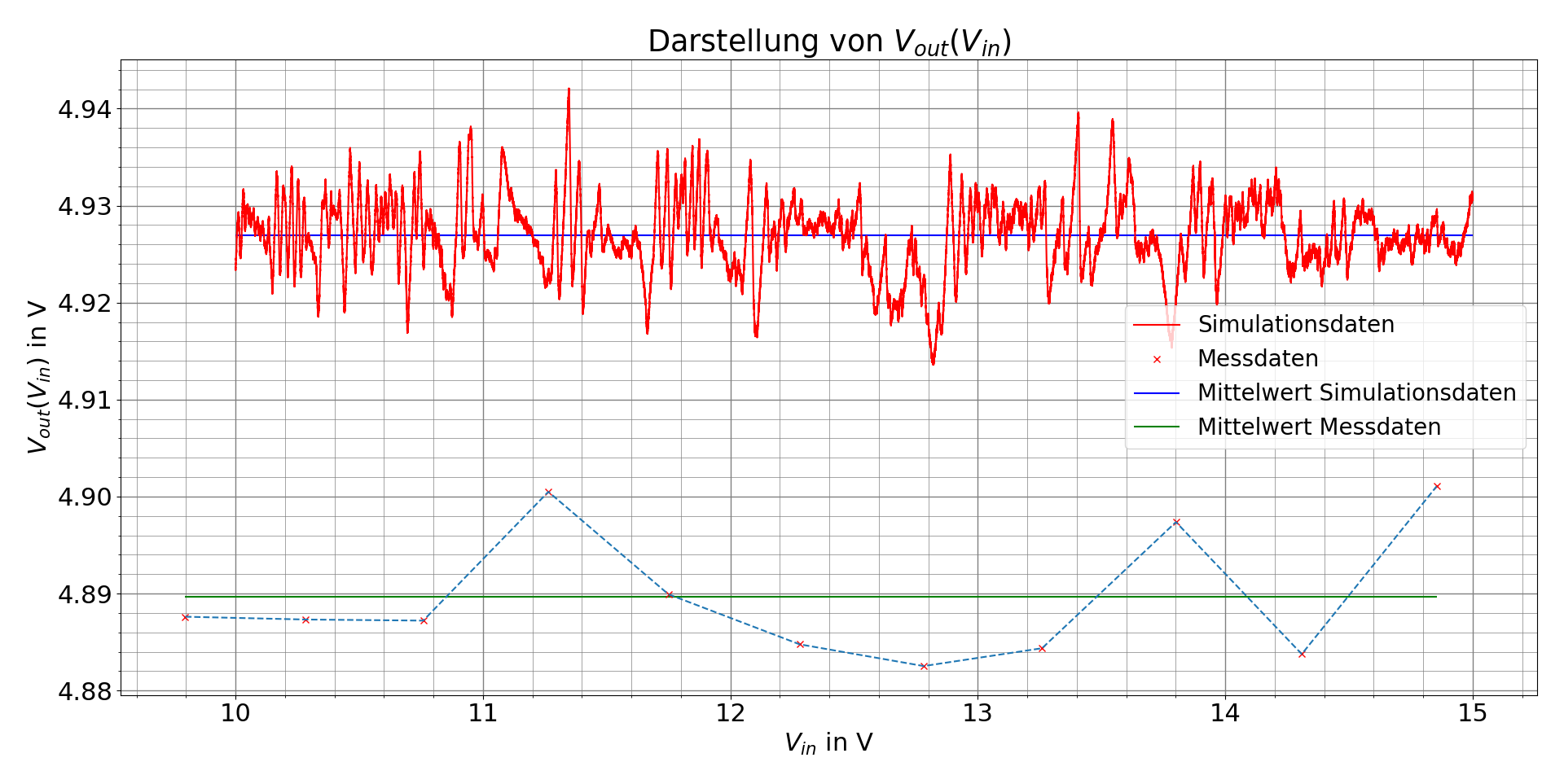
Abb. 136 Simulierte und messtechnisch ermittelte Ausgangsspannung \(V_{out}\) über die Eingangsspannung \(V_{in}\) bei einer Last von 20 \(\Omega\)¶
Die simulierten und gemessenen Ausgangsspannungen sind beide bis auf ein Rauschen konstant. Die simulierte Ausgangsspannung liegt durchschnittlich bei ca. 4,926 V und die messtechnisch ermittelte bei ca. 4,89 V.
Simulierte/r und messtechnische/r Ausgangsspannung und -strom bei fester Eingangsspannung und dynamischer Last¶
Abb. 137 stellt die Messung \(V_{out}(I_{out})\) dar.
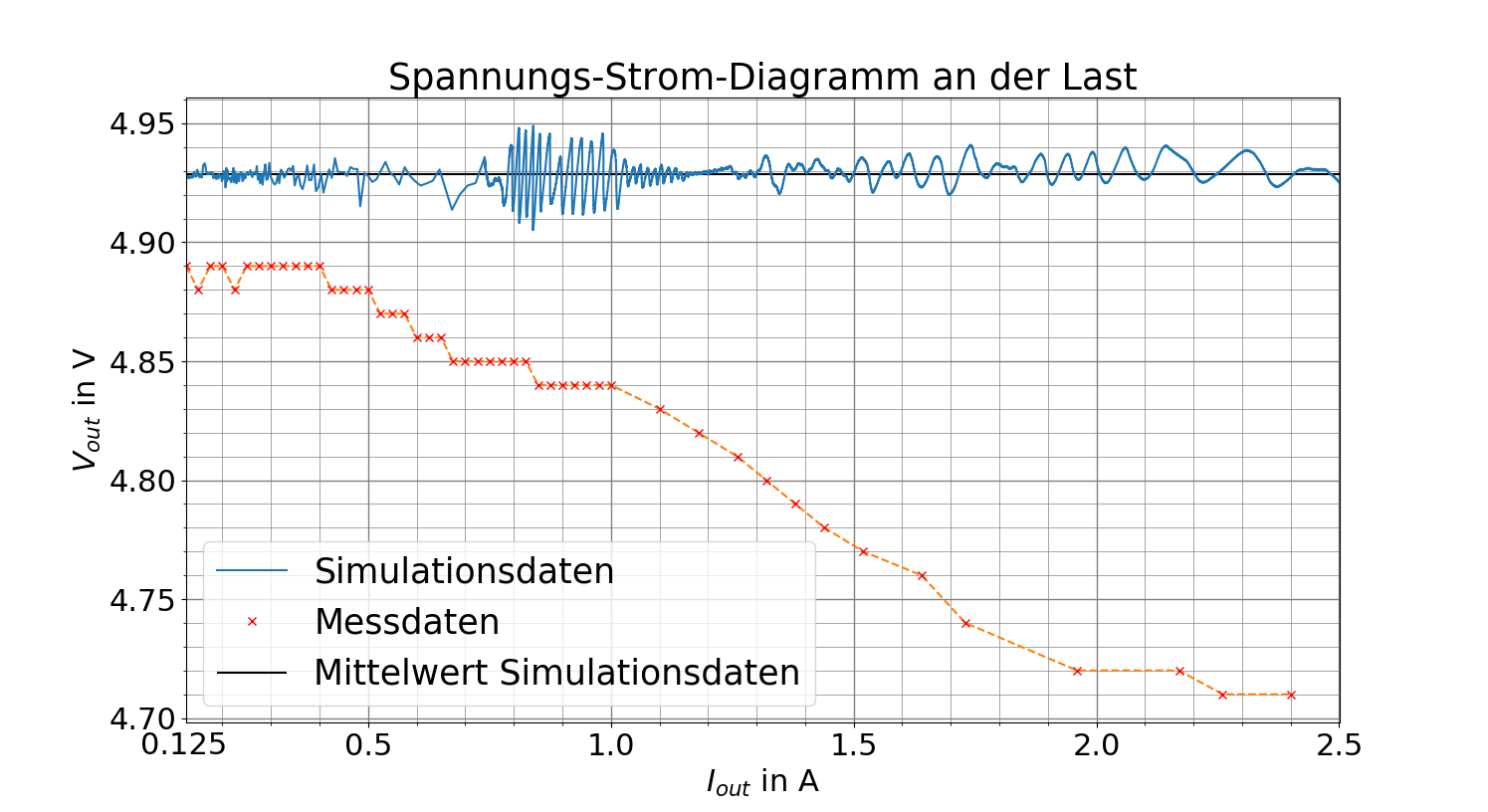
Abb. 137 Simulierte/r und messtechnisch ermittelte/r Ausgangsspannung und -strom¶
Die simulierte Ausgangsspannung oszilliert um ca. 4,928 V. Es ist kein Spannungsabfall bei erhöhtem Strom zu erkennen. Die Schaltung kann laut Simulation über den gesamten Strombereich von 125 mA bis 2,5 A betrieben werden. Bei der Messung an der Schaltung hingegen fällt die Ausgangsspannung bei steigendem Strom ab, so dass sie anfangs bei 125 mA bei 4,89 V liegt und bei 2,4 A bei 4,71 V. Wird der Strom weiter erhöht, so bricht die Ausgangsspannung komplett ein. Die Spannung fällt nicht linear. Es ist zu beobachten, dass die Spannung schneller fällt, umso höher der Ausgangsstrom ist.
Simulierter und messtechnischer Tastgrad¶
Der aus Simulations- und Messwerten rechnerisch ermittelte Tastgrad ist in Abb. 138 zu erkennen. Der Tastgrad wurde durch Gl. 49 berechnet.
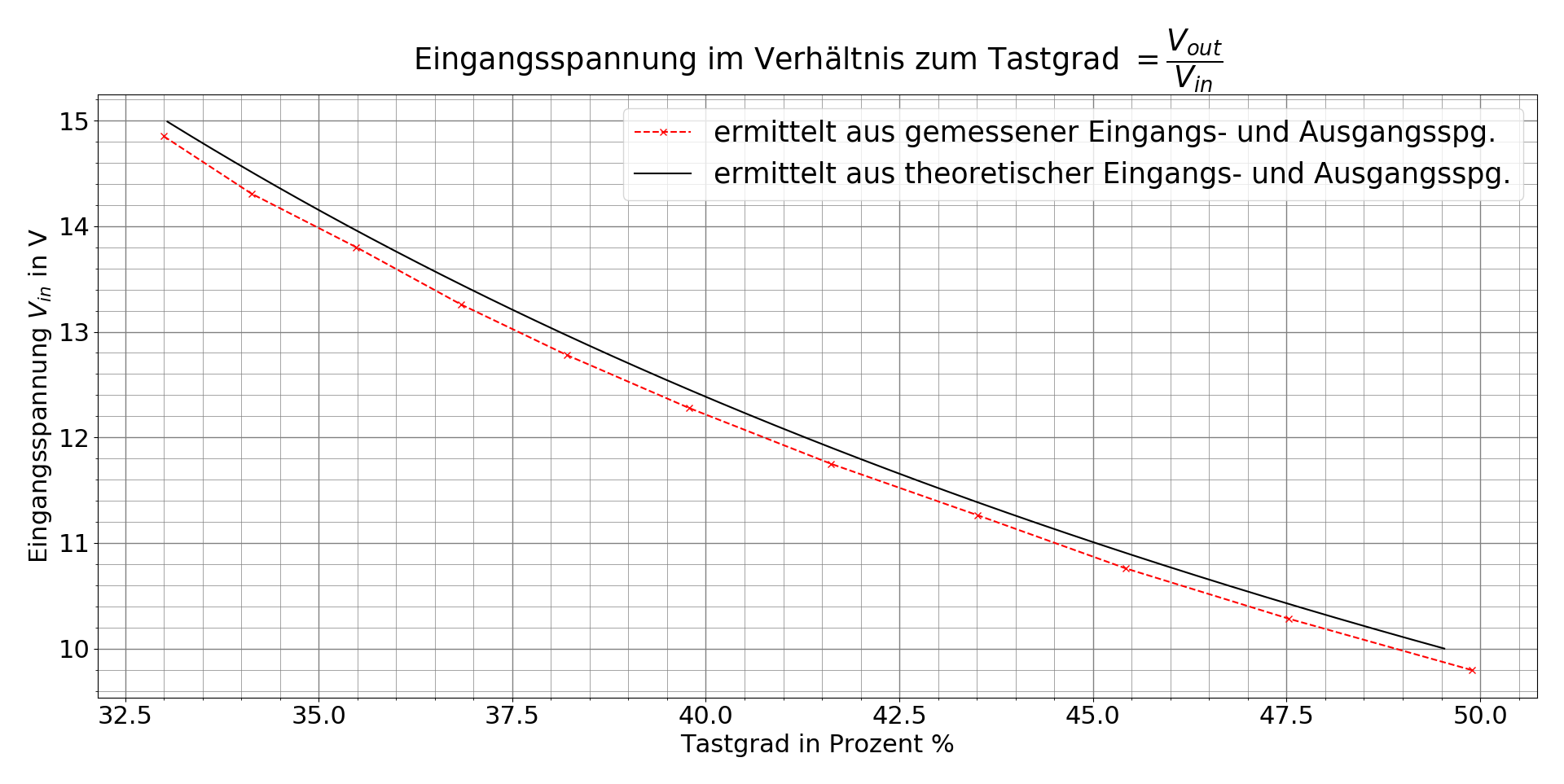
Abb. 138 Simulierter und messtechnisch ermittelter Tastgrad über die Eingangsspannung bei einer Last von 20 \(\Omega\)¶
Der Verlauf zwischen Messung und Simulation ist bis auf einen Versatz von ca. 150 mV gleich. Es ist zu erkennen, dass der Tastgrad bei fallender Eingangsspannung steigt. Die Graphen besitzen eine leichte Krümmung.
Die folgenden beiden Abbildungen zeigen die Messung mit dem Oszilloskop. In diesen ist zu erkennen, dass das Rechtecksignal vom duty cycle (blau) verformt ist. Aufgrund dieser Verformung konnte die Funktion im Oszilloskop den duty cycles nicht zuverlässig bestimmen.
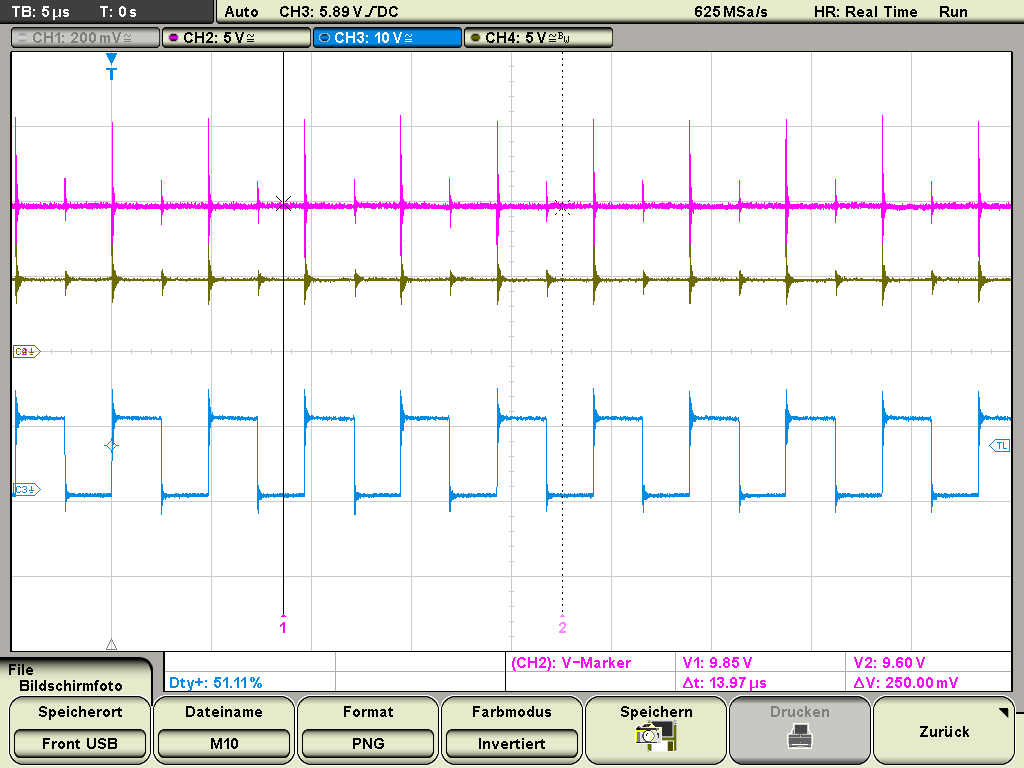
Abb. 139 Darstellung des Tastgrad bei einer Eingangsspannung von ca. 9,8 V¶
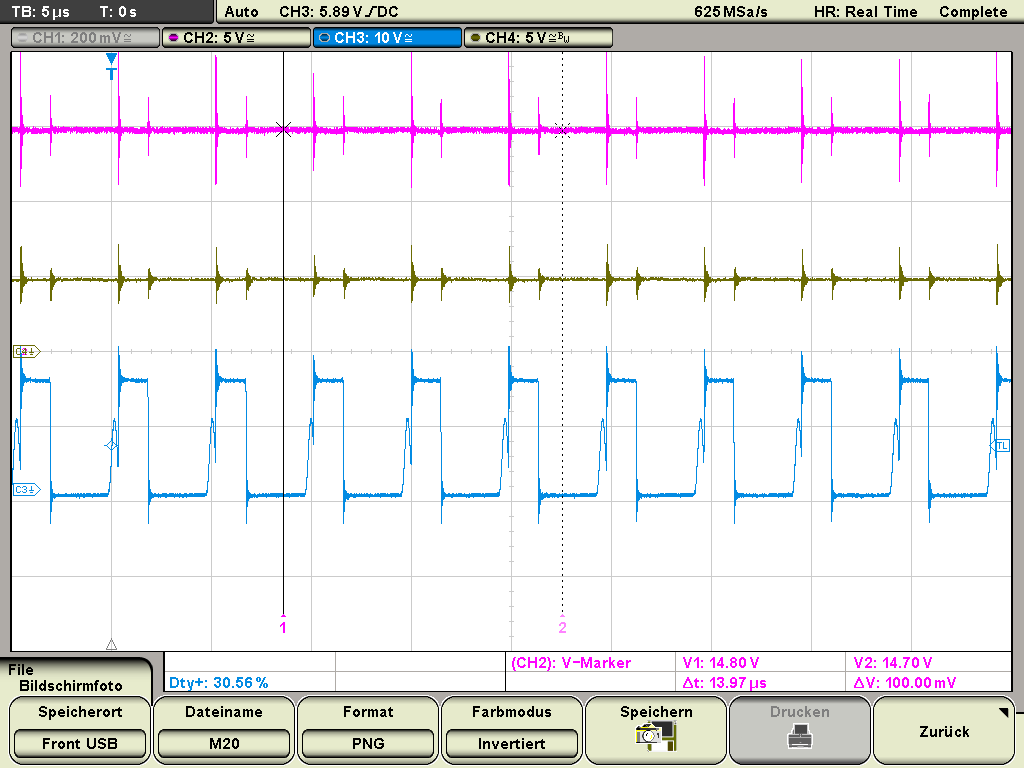
Abb. 140 Darstellung des Tastgrad bei einer Eingangsspannung von ca. 14,85 V¶
Wie zuvor erwähnt, weicht der Tastgrad des Messgeräts von den errechneten Werten ab.
Diskussion¶
Folgend werden die Simulations- und Messergebnisse diskutiert.
Wellenformen¶
Die unterschiedlichen Frequenzen der Mess- bzw. Simulationswerte können zum Teil auf die unterschiedliche Eingangsspannung zurückgeführt werden. Ausgehend vom Datenblatt des TPS40200 ([12], S.23, Figure 7) ist zu erkennen, dass die Frequenz des Oszillators und somit auch die PWM-Frequenz steigt, sobald die Eingangsspannung sinkt. Im Fall der Messung wurde eine geringere Eingangsspannung als bei der Simulation gemessen. Somit müsste die Messung eine höhere Oszillatorfrequenz aufweisen als die Simulation, was auch der Fall ist. Weiterhin könnte der Effekt der schwankenden Frequenz bei den Messdaten auf die nicht linear verlaufende Eingangsspannung \(V_{in}\) zurückzuführen sein, da die Oszillatorfrequenz von der Eingangsspannung abhängt. Zu beachten ist, dass nur ein Ausschnitt von 0,1 ms betrachtet wird. Das die Frequenzen in diesem Bereich sinken, wird zufällig sein, da sie irgendwann auch wieder steigen muss, um nicht gegen null zu gehen.
Nach Gl. 52 ergibt sich eine theoretische Oszillatorfrequenz von 202,63 kHz. Somit ergibt sich für die TP3 und TP4 der simulierten Daten eine maximale Abweichung von 3,87 %. Für die Messdaten ergibt sich auf dem gleichen Weg eine maximale Abweichung von 3,07 %.
Die in die Schaltung eingespeisten 10 V Eingangsspannung konnten messtechnisch nicht nachgewiesen werden. Es wurden stattdessen nur ca. 9,75 V erreicht. Dies macht eine Differenz von 0,25 V. Der Tastgrad - zwischen der Simulation mit 10 V Eingangsspannung und 4,93 V Ausgangsspannung und der Messung mit 9,8 V Eingangsspannung und 4,88 V Ausgangsspannung - beträgt nach Gl. 49 0,492 beziehungsweise 0,498. Dies ist rein optisch nicht zu erkennen. Gerundet betragen jedoch beide Tastgrade 50 % mit einer Differenz von 0,4 % bzw. 1,6 %.
Die Ausgangsspannung weicht zwischen dem errechneten Wert von 4,928 V nach Gl. 56 und dem simulierten Wert von durchschnittlich 4,9315 V um -0,08 % ab. Zwischen Theorie und der gemessenen Ausgangsspannung von 4,88 V ergibt dies einen Unterschied von -0,97 %.
Die Spannungsspitzen, die bei der gemessenen Ausgangsspannung zu sehen sind, entstehen durch Selbstinduktion der Spule L201. Sie treten auf, weil in dem Moment, in dem bei dem PWM-Signal bspw. ein Wechsel von 10 V zu 0 V stattfindet (Flanke) eine abrupt Änderung des Stromes in der Spule erfolgt. Da die Spannung an der Spule vom Grad der Stromänderung abhängt ([6], S.150, 9.6), erzeugt dies kurzzeitig eine höhere Ausgangsspannung.
Da sowohl die gemessene Eingangs- und Ausgangsspannung niedriger ist als die theoretischen Werte, könnte ein Grund für die Differenz ein Messfehler des Oszilloskops sein. Des weiteren sind Abweichungen durch Bauteiltoleranzen von Widerständen, Spulen und Kondensatoren mit einzubeziehen. Dennoch kann die Aussage getroffen werden, dass die Simulation durch die Messung bestätigt werden konnte, da keine größeren Abweichungen aufgetreten sind.
Ausgangsspannung bei fester Last¶
Die Abweichung zwischen der theoretisch errechneten Ausgangsspannung durch Gl. 56 und Simulation beträgt -0,01 %. Im Vergleich zu Wellenformen wurde hier über eine längere Zeit simuliert. Das Ergebnis ist näher an der Simulation. Dies stellt sehr gut den Vergleich zwischen Theorie und Simulation dar. Wird die Simulation als Erwartungswert gesetzt, so weicht die gemessene Ausgangsspannung bei einer Last von 20 \(\Omega\) um -0,73 % ab. Weiterhin ist zu erkennen, dass die Eingangsspannung im Bereich von 10 V bis 15 V die Ausgangsspannung nicht beeinflusst. Es ist ein Schwanken um den Mittelwert zu erkennen. Dieses folgt aber keinem erkennbaren Muster, daher wird dies auf Rauschen zurückgeführt. Die Ausgangsspannung kann somit für unterschiedliche Eingangsspannungen im genannten Bereich als konstant angesehen werden. Bei dem Versatz von ca. 4 mV wird vermutet, dass dieser durch Bauteil- und Messungenauigkeit zustande kommt.
Ausgangspannung und -strom bei fester Eingangsspannung und dynamischer Last¶
Die Ausgangsspannung oszilliert in der Simulation bei unterschiedlichem Strom um einen Wert von ca. 4,93 V. In der Messung hingegen fällt die Ausgangsspannung mit steigendem Strom ab. Um so höher der Strom wird, desto schneller fällt die Ausgangsspannung. Hier passen Simulation und Messung nicht zusammen. Weiterhin wird die im Datenblatt angegebene maximale Grenze des Stromes nicht erreicht. Die Spannung bricht vorher bei 2,4 A zusammen. Auch im unteren Lastbereich wird die erwartete Ausgangsspannung nicht erreicht.
Dadurch, dass die Schaltung ihre Strombegrenzung bereits bei 2,4 A erreicht hat, zeigt sich, dass die im Datenblatt empfohlenen 25 % nicht ausreichen. Trotzdem ist es gut, diese nicht zu verändern, um zu gewährleisten, dass die 2,5 A nicht überschritten werden können und es so nicht zu einer Zerstörung von Bauteilen kommt. Die 2,5 A werden vermutlich nicht erreicht, weil die Rippel der Ausgangsspannung bei einem Strom von 2,5 A bis auf 60 mV ansteigen ([12]) und dieser Effekt unterschätzt wird. Bei einem Lastwiderstand von 20 \(\Omega\) lagen die Rippel nur bei ca. 20 mV. Durch die größeren Rippel steigt kurzfristig der Strom an, wodurch früher abgeschaltet wird.
Wie angenommen, verringert sich die Ausgangsspannung bei einer niedrigeren Last und dem damit verbundenen höheren Ausgangsstrom. In der Simualtion wird dies nicht berücksichtigt.
Tastgrad¶
Der Verlauf des Tastgrades an TP4 ist für unterschiedliche Eingangsspannungen zwischen Simulation und Praxis bis auf einen Versatz sehr ähnlich. Der Verlauf zeigt keine Gerade. Anhand Gl. 49 ließ sich dies schon theoretisch erklären. Nach Gl. 49 und einer angenommenen Ausgangspannung von 5 V sollte der Tastgrad zwischen 33,33 % und 50 % liegen. Dies stimmt mit der Simulation und der Messung überein. Kleinere Abweichungen sind dadurch zu erklären, dass die tatsächliche Ausgangsspannung von den 5 V abweichen. Der Tastgrad wurde rechnerisch bestimmt. Abb. 139 und Abb. 140 spiegeln dieses Verhalten aber wieder. Der Versatz kann durch die Differenz in den Ausgangsspannungen erklärt werden. Wird Gl. 49 betrachtet, kann erkannt werden, dass bei gleicher Eingangsspannung aber geringerer Ausgangsspannung der Tastgrad abnimmt.
Zusammenfassung¶
Die vorliegende Arbeit stellt eine Parameterstudie eines DC-DC Konverters dar. Grundlage dafür ist der nicht synchrone Abwärtswandler TPS40200 auf dem Evaluationsmodul ASLK PRO. Dafür wurden folgende Punkte untersucht:
die Wellenformen der Eingangs- \(V_{in}\) und Ausgangsspannung \(V_{out}\) sowie die Oszillatorspannung (TP3) und das PWM-Signal (TP4)
die Ausgangsspannung bei fester Last
Ausgangsspannung \(V_{out}\) und -strom \(I_{out}\) bei fester Eingangsspannung und dynamischer Last
Tastgrad (duty cycle)
Diese Punkte wurden durch Simulationen mit dem Programm TINA-TI und Lobormessungen untersucht. Im Anschluss wurden die Ergebnisse dargestellt und miteinander verglichen. Dabei ergaben sich einige Differenzen zwischen der gemessenen und simulierten Oszillatorfrequenz. Weiterhin veränderten sich beide Frequenzen über die Zeit. Zur Abklärung dieser Differenzen sind weitere Messungen zur Oszillatorfrequenz notwendig. Es kann jedoch die Aussage bei den Wellenformen getroffen werden, dass die Simulation durch die Messung bestätigt werden konnte, da keine größeren Abweichungen aufgetreten sind.
Die Ausgangspannungen \(V_{out}\) bei fester Last weichen im Mittelwert nur um 0,04 V voneinander ab. Es wurde hier gezeigt, dass die Simulation durch die Messung bestätigt wurde.
Bei der Betrachtung von \(V_{out}\) und \(I_{out}\) bei dynamischer Last wurde bei der Simulation festgestellt, dass \(I_{out}\) von bis zu 2,5 A der Schaltung entnommen werden kann, ohne, dass es Auswirkungen auf \(V_{out}\) hat. Die Messung hingegen hat gezeigt, dass die Schaltung nur bis 2,4 A liefern kann und \(V_{out}\) ab 0,5 A nicht mehr konstant ist. Mit steigendem \(I_{out}\) sinkt \(V_{out}\).
Die Behandlung der Tastgrade ergab, dass die Simulations- und Messdaten ähnliche Tastgrade ergaben. Sie unterscheiden sich augenscheinlich gar nicht. Ohne dabei die unterschiedlichen Eingangsspannungen zu berücksichtigen. So kann auch hier abschließend festgestellt werden, dass die Simulation durch die Messung bestätigt wurde.
Es kann gesagt werden, dass eine Simulation einer solchen Schaltung zum großen Teil gute bis sehr gute Näherungen bereitstellt. Jedoch ist immer auch Vorsicht geboten, wie bei der Untersuchung der Ausgangsspannung in Abhängigkeit des Ausgangsstroms gezeigt werden konnte. Bei Wiederholungsmessungen müsste herausgearbeitet werden, woraus die niedrigere Eingangsspannung bei den Messungen resultiert, um so ein eindeutigeres Messergebnis zu erlangen.
Literaturverzeichnis¶
Energie des magnetischen Feldes | LEIFIphysik. 11.06.2020. URL: \url{https://www.leifiphysik.de/elektrizitaetslehre/elektromagnetische-induktion/grundwissen/energie-des-magnetischen-feldes} (visited on 11.06.2020).
Gruppe-Experiment-5. Ltspice. Selbstgemacht, 2020.
Gruppe-Experiment-5. Matlab. Selbstgemacht, 2020.
Texas Instruments Incorporated. Mpy634. Wide BandwidthPRECISION ANALOG MULTIPLIER, 2020.
Texas Instruments and Incorporated. Understanding the Terms and Definitions of LDO Voltage Regulators. URL: \url{https://www.ti.com/lit/an/slva079/slva079.pdf?ts=1591961137391} (visited on 12.06.2020).
Marlene Marinescu and Jürgen Winter. Basiswissen Gleich- und Wechselstromtechnik: Mit ausführlichen Beispielen ; [Bachelor geeignet! Friedr. Vieweg & Sohn Verlag | GWV Fachverlage GmbH Wiesbaden, Wiesbaden, 2., überarbeitete auflage edition, 2008. ISBN 978-3-8348-0344-3.
K.R.K. Rao and C. P. Ravikumar. Analog system lab kit pro manual. aslk-pro-manual-v103, June 2012.
K. Sasikala and S. Pradeep Kumar Dr. E. N. Ganesh. Design of adaptive analog self tuning filters. International Journal of Management, Technology and Engineering, 2019. https://www.researchgate.net/publication/330579445_Design_of_Adaptive_Analog_Self_Tuning_Filters Zugriff: 23.06.2020.
Ulrich Tietze, Christoph Schenk, and Eberhard Gamm. Halbleiter-Schaltungstechnik: Neuer Teil: nachrichtentechnische Schaltungen. Springer, Berlin, 12. aufl. edition, 2002. ISBN 3540428496.
Prof. Dr.-Ing. Thorsten Völker. Skript: Leistungselektronik: Hochschule Bremen, Elektrische Energietechnik. 01. Oktober 2014.
TEXAS INSTRUMENTS. Analog System Lab Kit PRO Manual. URL: \url{https://download.mikroe.com/documents/specials/educational/aslk-pro/aslk-pro-manual-v103.pdf}.
TEXAS INSTRUMENTS. TPS40200: Wide Input Range Non-Synchronous Voltage Mode Controller. URL: \url{http://www.ti.com/lit/ds/symlink/tps40200.pdf}.
TEXAS INSTRUMENTS. Understanding output voltage limitations of DC/DC buck converters. URL: \url{https://www.ti.com/lit/an/slyt293/slyt293.pdf}.